Material System
In RaiSim, material properties are defined per material pair.
RaiSim currently utilizes seven material properties:
Coefficient of friction (\(\mu\ge 0\)): Defines the frictional force applied between two contacting materials.
Coefficient of restitution (\(c_r\ge 0\)): Determines the elasticity of the material pair.
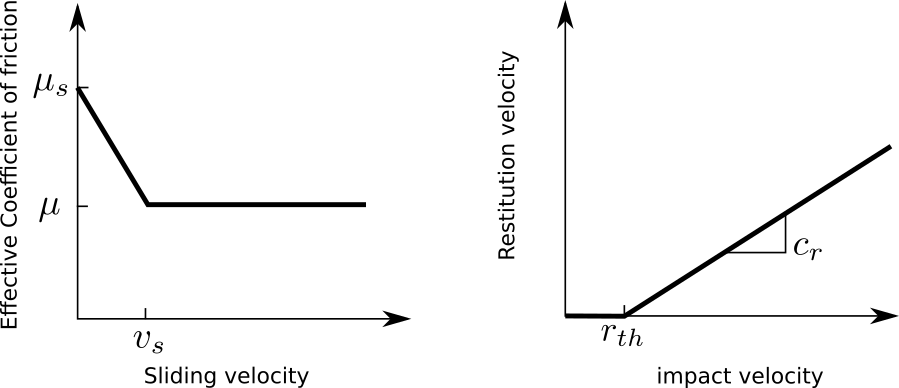
Restitution threshold (\(r_{th}\ge 0\)): Objects will not rebound if the impact velocity falls below this threshold.
Coefficient of static friction (\(\mu_{s}\ge \mu\)): When specified, this defines the frictional force applied during near-zero relative velocity between contact points. By default, it equals the coefficient of friction.
Velocity threshold for static friction (\(v_s \ge 0\)): Required when the coefficient of static friction is defined. If the relative velocity exceeds this value, static friction is disregarded. Otherwise, the effective coefficient of friction is interpolated between the static and dynamic coefficients.
Coefficient of rolling friction (\(\mu_r \ge 0\)): Resists rotation that rolls a finite-radius body over a contact patch. It is disabled by default.
Coefficient of spinning friction (\(\mu_s^{spin} \ge 0\)): Resists torsional rotation about the contact normal. It is disabled by default.
The bounce velocity is computed as \(c_{th}(v_i-c_{th})\), where \(v_i\) represents the impact velocity. The following graphs illustrate the effects of these material properties.
Current runnable examples are listed in the examples index. The material API below is unchanged and can be applied to any world object material name.
A material name is assigned upon creation. For instance:
auto ball = world.addSphere(1, 1, "steel");
The World instance maintains a MaterialManager that stores all material pair properties.
Undefined material pairs utilize default material properties, which can be configured via raisim::World::setDefaultMaterial.
If default properties are not explicitly set, they default to {\(\mu=0.8\), \(c_r=0\), \(c_{th}=0\)}.
Material properties for a specific pair can be defined as follows:
world.setMaterialPairProp("steel", "glass", 0.7, 0.1, 0.15);
The first two arguments specify the material names, followed by the coefficient of friction, coefficient of restitution, and restitution threshold. The order of the material names is interchangeable.
For static friction, rolling friction, and spinning friction, use the extended overload:
world.setMaterialPairProp(
"rubber", "floor",
0.9, // dynamic friction mu
0.0, // restitution
0.0, // restitution threshold
1.1, // static friction mu_static
1e-3, // static-friction velocity threshold
0.05, // rolling friction mu_r
0.02); // spinning friction mu_spin
Rolling and Spinning Friction
Purpose
Coulomb friction acts on the tangential relative velocity of the two contact points. It is enough to oppose sliding, but it does not model all rotational losses at a finite contact patch. A sphere or cylinder can therefore keep rolling for too long, and an object spinning in place about the contact normal can keep rotating even when there is no lateral slip. Rolling and spinning friction add bounded angular friction impulses to handle those two effects.
These coefficients are per material pair, just like ordinary friction. They are zero by default. If both are zero, RaiSim keeps the normal contact solver path and does not run the extra angular-friction path for that material pair.
Coordinate and shape conventions
RaiSim uses a z-up world convention. For primitive cylinders, the cylinder axis is the body’s local z axis. A default cylinder standing on a flat ground plane has its cylinder axis aligned with world z. That configuration is useful for spinning-friction tests, but it is not a rolling cylinder. To test or model cylinder rolling, rotate the cylinder so its local z axis lies in the horizontal world x-y plane.
The contact frame has its local z axis along the contact normal. Angular friction is solved in this contact frame:
contact-frame x and y angular components are rolling components;
contact-frame z angular component is the spinning component.
Model
For a contact with normal impulse \(p_n\), effective rolling radius \(r_e\), rolling coefficient \(\mu_r\), and spinning coefficient \(\mu_{spin}\), RaiSim computes a bounded angular impulse \(\boldsymbol{\tau}\) in the contact frame. The tangential part \(\boldsymbol{\tau}_{xy}\) opposes rolling angular velocity, and the normal part \(\tau_z\) opposes spinning angular velocity:
The contact normal impulse \(p_n\) is the solved normal impulse for the same contact during the current contact iteration. The radius \(r_e\) is estimated from the dynamic object’s contact point to center-of-mass distance. For a sphere on a plane this is the sphere radius. For a cylinder lying on its side it is the cylinder radius at the side contact. For two dynamic bodies, RaiSim averages the two available contact radii.
The solver forms the relative angular velocity in the contact frame, \(\boldsymbol{\omega}_{rel}\), and an angular apparent inverse inertia:
where \(\mathbf{R}_c\) maps contact-frame impulses to world-frame angular impulses, and missing/static bodies contribute zero inverse inertia. The unconstrained angular impulse is then
and is projected onto the rolling/spinning friction bounds above. The impulse increment is applied to generalized velocity inside the contact solver iteration. This is intentionally not a post-step damping torque: applying torques after the contact solve can violate the contact constraints that were just solved and can produce penetration or lift-off artifacts.
Solver behavior and performance
Rolling/spinning friction is solver-integrated but opt-in:
Material pairs with \(\mu_r = 0\) and \(\mu_{spin} = 0\) use the standard contact path.
If any active contact has nonzero rolling or spinning friction, RaiSim uses an extended contact-solver path for that step.
The extra work is local to contacts whose material pair requests angular friction. It computes contact-frame angular velocity, angular apparent inertia, and the projected angular impulse.
This keeps existing scenes fast by default while allowing higher-fidelity rolling and spinning decay where the material pair needs it.
Choosing coefficients
Rolling and spinning coefficients are not replacements for Coulomb friction. Use them for rotational losses at a contact patch:
Increase \(\mu_r\) when balls, wheels, barrels, or side-lying cylinders roll for too long despite plausible sliding friction.
Increase \(\mu_{spin}\) when objects spin in place too long about the contact normal.
Keep both zero for contacts where rotational loss is not important or where speed is more important than this detail.
Start with small values such as
0.01to0.05. Large values can make rolling decay very aggressive and can increase solver coupling.
The spinning-friction case can be tested independently by setting Coulomb/static
friction to zero and setting only spinningFriction. The object should spin
down without relying on lateral slip friction.
C++ examples
Sphere rolling on a z-up ground plane:
raisim::World world;
world.setGravity({0.0, 0.0, -9.81});
world.addGround(0.0, "ground");
world.setMaterialPairProp(
"ground", "ball",
1.0, 0.0, 0.0, // dynamic friction, restitution, threshold
1.0, 1e-3, // static friction and transition speed
0.05, 0.0); // rolling friction, spinning friction
auto* ball = world.addSphere(0.5, 1.0, "ball");
ball->setPosition(0.0, 0.0, 0.5);
ball->setVelocity(2.0, 0.0, 0.0, 0.0, -4.0, 0.0);
Cylinder rolling on a z-up ground plane. The cylinder local z axis is first rotated to world x, so angular velocity about world x rolls it along world y:
auto* cylinder = world.addCylinder(0.3, 0.8, 1.0, "body");
cylinder->setOrientation(0.7071067812, 0.0, 0.7071067812, 0.0);
cylinder->setPosition(0.0, 0.0, 0.3);
cylinder->setVelocity(0.0, 2.4, 0.0, 14.0, 0.0, 0.0);
Spinning friction without Coulomb sliding friction:
world.setMaterialPairProp(
"ground", "body",
0.0, 0.0, 0.0, // no Coulomb/static friction contribution
0.0, 1e-3,
0.0, 0.08); // spinning friction only
auto* cylinder = world.addCylinder(0.3, 0.8, 1.0, "body");
cylinder->setPosition(0.0, 0.0, 0.4); // upright cylinder on z-up ground
cylinder->setVelocity(0.0, 0.0, 0.0, 0.0, 0.0, 12.0);
XML examples
Rolling and spinning friction can also be set on pair_prop entries:
<material>
<default friction="0.8" restitution="0" restitution_threshold="0"/>
<pair_prop name1="ground" name2="ball"
friction="1.0" restitution="0" restitution_threshold="0"
static_friction="1.0" static_friction_velocity_threshold="0.001"
rolling_friction="0.05" spinning_friction="0.02"/>
</material>
Validation
RaiSim includes a regression test for the model. It checks that:
a rolling sphere stops;
side-lying cylinders rolling along world x and world y stop;
a sphere and upright cylinder spinning about world z stop when only spinning friction is enabled;
all objects remain on the z-up ground plane without monotonic sinking or lift-off.
The benchmark rolling_spinning_friction creates many rolling spheres and
side-lying cylinders with high initial angular velocity and can record a video
for visual inspection.
Example - Single Bodies
XML Approach
<?xml version="1.0" ?>
<raisim version="2.0.0">
<timeStep value="0.001"/>
<objects>
<ground name="ground" material="steel"/>
<sphere name="sphere_steel" mass="1" material="steel">
<dim radius="0.5"/>
<state pos="-2 0 5" quat="1 0 0 0" linVel="0 0 0" angVel="0 0 0"/>
</sphere>
<sphere name="sphere_rubber" mass="1" material="rubber">
<dim radius="0.5"/>
<state pos="0 0 5" quat="1 0 0 0" linVel="0 0 0" angVel="0 0 0"/>
</sphere>
<sphere name="sphere_copper" mass="1" material="copper">
<dim radius="0.5"/>
<state pos="2 0 5" quat="1 0 0 0" linVel="0 0 0" angVel="0 0 0"/>
</sphere>
</objects>
<material>
<default friction="0.8" restitution="0" restitution_threshold="0"/>
<pair_prop name1="steel" name2="steel" friction="0.8" restitution="0.95" restitution_threshold="0.001" rolling_friction="0.02" spinning_friction="0.01"/>
<pair_prop name1="steel" name2="rubber" friction="0.8" restitution="0.15" restitution_threshold="0.001"/>
<pair_prop name1="steel" name2="copper" friction="0.8" restitution="0.65" restitution_threshold="0.001"/>
</material>
<camera follow="anymal" x="1" y="1" z="1"/>
</raisim>
C++ Approach (Single Bodies)
#include "raisim/RaisimServer.hpp"
#include "raisim/World.hpp"
int main(int argc, char* argv[]) {
auto binaryPath = raisim::Path::setFromArgv(argv[0]);
raisim::World::setActivationKey(binaryPath.getDirectory() + "\\rsc\\activation.raisim");
/// Create RaiSim world
raisim::World world;
world.setTimeStep(0.001);
/// Create objects
world.addGround(0, "steel");
auto sphere1 = world.addSphere(0.5, 1.0, "steel");
auto sphere2 = world.addSphere(0.5, 1.0, "rubber");
auto sphere3 = world.addSphere(0.5, 1.0, "copper");
sphere1->setPosition(-2,0,5);
sphere2->setPosition(0,0,5);
sphere3->setPosition(2,0,5);
world.setMaterialPairProp("steel", "steel", 0.8, 0.95, 0.001);
world.setMaterialPairProp("steel", "rubber", 0.8, 0.15, 0.001);
world.setMaterialPairProp("steel", "copper", 0.8, 0.65, 0.001);
/// Launch RaiSim server
raisim::RaisimServer server(&world);
server.launchServer();
for (int i = 0; i < 10000000; i++) {
raisim::MSLEEP(1);
server.integrateWorldThreadSafe();
}
server.killServer();
}
Example - Articulated Systems
URDF Approach
Material properties can be specified within the URDF file as follows:
<!-- Foot link -->
<link name="LF_FOOT">
<collision>
<origin xyz="0 0 0.02325"/>
<geometry>
<sphere radius="0.035"/>
</geometry>
<material name="">
<contact name="ice"/>
</material>
</collision>
</link>
C++ Approach (Articulated Systems)
Alternatively, materials can be assigned dynamically:
anymal->getCollisionBody("LF_FOOT/0").setMaterial("ice");
Here, “LF_FOOT/0” refers to the first collision body of the “LF_FOOT” link.
To retrieve the name of an assigned material:
ANYmal->getCollisionBody("LF_FOOT/0").getMaterial();
To obtain contact properties for a collision between two materials:
world.getMaterialPairProp(ANYmal->getCollisionBody("LF_FOOT/0").getMaterial(),
ground->getCollisionObject().getMaterial());
API
Material Pair Properties
-
struct MaterialPairProperties
Public Members
-
double c_f
Coefficient of friction.
-
double c_r
Coefficient of restitution.
-
double r_th
Restitution threshold velocity.
-
double c_static_f
Static friction coefficient.
-
double v_static_speed
Static friction transition speed.
-
double v_static_speed_inv
Inverse of static friction transition speed.
-
double c_rolling_f
Rolling friction coefficient. Zero keeps the standard contact solver path.
-
double c_spinning_f
Spinning friction coefficient. Zero keeps the standard contact solver path.
-
double c_f
Material Manager
-
class MaterialManager
Public Functions
-
explicit MaterialManager(const std::string &xmlFile)
upload material data from file
Public Members
-
std::unordered_map<unsigned int, MaterialPairProperties> materials_
Map from material id to properties for the default material pairing.
-
std::unordered_map<std::string, unsigned int> materialKeys_
Map from material name to material id.
-
MaterialPairProperties defaultMaterial_
Default material properties (used when no override exists).
-
unsigned int nextMaterialIdx_
Next material id to allocate.
-
explicit MaterialManager(const std::string &xmlFile)