RaisimGymTorch
What is RaisimGymTorch?
RaisimGymTorch is a gym environment example for RaiSim. A lightweight PyTorch-based RL framework is provided, but it should work with other RL frameworks. Instead of using RaisimPy, nanobind wraps a vectorized environment in C++ so that the parallelization happens in C++. This improves performance significantly.
Why RaisimGymTorch?
RaisimGymTorch is designed to collect tens of billions of state transitions with a single desktop machine. Such a number of state transitions can be necessary for challenging tasks. An example of a trained policy is shown below.
Approximately 160 billion time steps were used to train the above controller. RaisimGymTorch can process about 500k time steps per second in the above environment (with 3950x) with an actuator network whose cost matches the physics simulation.
Dependencies
Assuming that you have installed RaiSim:
Anaconda
PyTorch (https://pytorch.org/)
To use the GPU, install CUDA as well. Use the version recommended by PyTorch.
OpenMP on Linux/Windows. On macOS, OpenMP is used when available; otherwise RaisimGymTorch builds with a serial fallback.
Other dependencies are installed when you build a RaisimGymTorch environment for the first time.
How to run the example
We provide an ANYmal locomotion example.
From the raisimGymTorch directory:
pip install numpy tensorboard ruamel.yaml
python setup.py develop
python raisimGymTorch/env/envs/rsg_anymal/runner.py
On macOS, source the package environment before building so Python can load the RaiSim and rayrai dynamic libraries:
cd ..
source ./raisim_env.sh
cd raisimGymTorch
python setup.py develop
If ../raisim or ../rayrai is missing, CMake downloads the matching
macOS package automatically: macos-arm64 on Apple Silicon, including
Rosetta shells, and macos-x86_64 on Intel when that asset is available.
Install libomp if you want OpenMP parallelism on macOS; without it, the C++
vectorized environment compiles with a serial fallback.
To visualize the policy, use rayrai_tcp_viewer as described in
Visualization. The training script records policy performance every 200
iterations. Older RaisimUnity/Unreal visualization workflows have been replaced;
see Legacy Integrations for migration notes.
How to debug
A nanobind package (e.g., your environment) can be difficult to debug because it is written in C++ but not run as a normal executable. We provide a debug app that wraps your environment and creates an executable. To build the debug app, build your environment with
python setup.py develop --Debug
Then, the debug executable is created next to your pybind11 package (raisimGymTorch/raisimGymTorch/env/bin).
If you use CLion (recommended), open the raisimGymTorch directory in CLion.
It will automatically add the debug app executable.
It provides a convenient GUI for debugging.
You can run the debug app as:
./debug_app_<environment name> <full path to rsc directory> <full path to the cfg file>
or add the arguments to the CLion run configuration.
On Windows, make sure that you are linking against the debug-build raisim. Visual Studio compiled executables will not work if it links against a library built with different compile flags.
How does it work?
RaisimGymTorch wraps a C++ environment (i.e., ENVIRONMENT.hpp) as a Python library using pybind11.
When you call python3 setup.py develop, all environments under raisimGymTorch/raisimGymTorch/env/envs are compiled.
The compiled libraries are stored in raisimGymTorch/raisimGymTorch/env/bin.
Everything else happens in Python.
You can import your environment from your Python code.
For example, the ANYmal locomotion environment can be imported as from raisimGymTorch.env.bin import rsg_anymal.
Your launch file (e.g., runner.py) can be customized as needed.
How to add a custom environment?
You can copy raisimGymTorch/raisimGymTorch to another location.
Delete the temporary directories build and raisim_gym_torch.egg-info (created when you run python setup.py develop).
To build in another directory, point CMake to RaiSim:
python setup.py develop --CMAKE_PREFIX_PATH <WHERE-YOU-HAVE-RAISIM>/raisim/<OS>
Everything will work without further steps. However, if you want to keep multiple environments, you may want to rename a few items.
Package name: You can find it in
setup.py(name='raisim_gym_torch'). This is the name you will find insite_packagesdirectory of your anaconda environment.Directory name: This is the directory name that you will find in the top
raisimGymTorchdirectory. The default name israisimGymTorch. Modify it if necessary, and update the directories in the header ofrunner.pyand theCMakeLists.txt.Binary name: This is the name of the directory of your environment. The default name is
rsg_anymal. If you change the directory name, updatersg_anymalinrunner.py.Environment name: This is the name of the binary that will be built from your
Environment.hppfile. The default name isRaisimGymVecEnv. You can find it inraisim_gym.cpp. If you change it, update the name inrunner.py.You can also create another conda environment to avoid name conflicts.
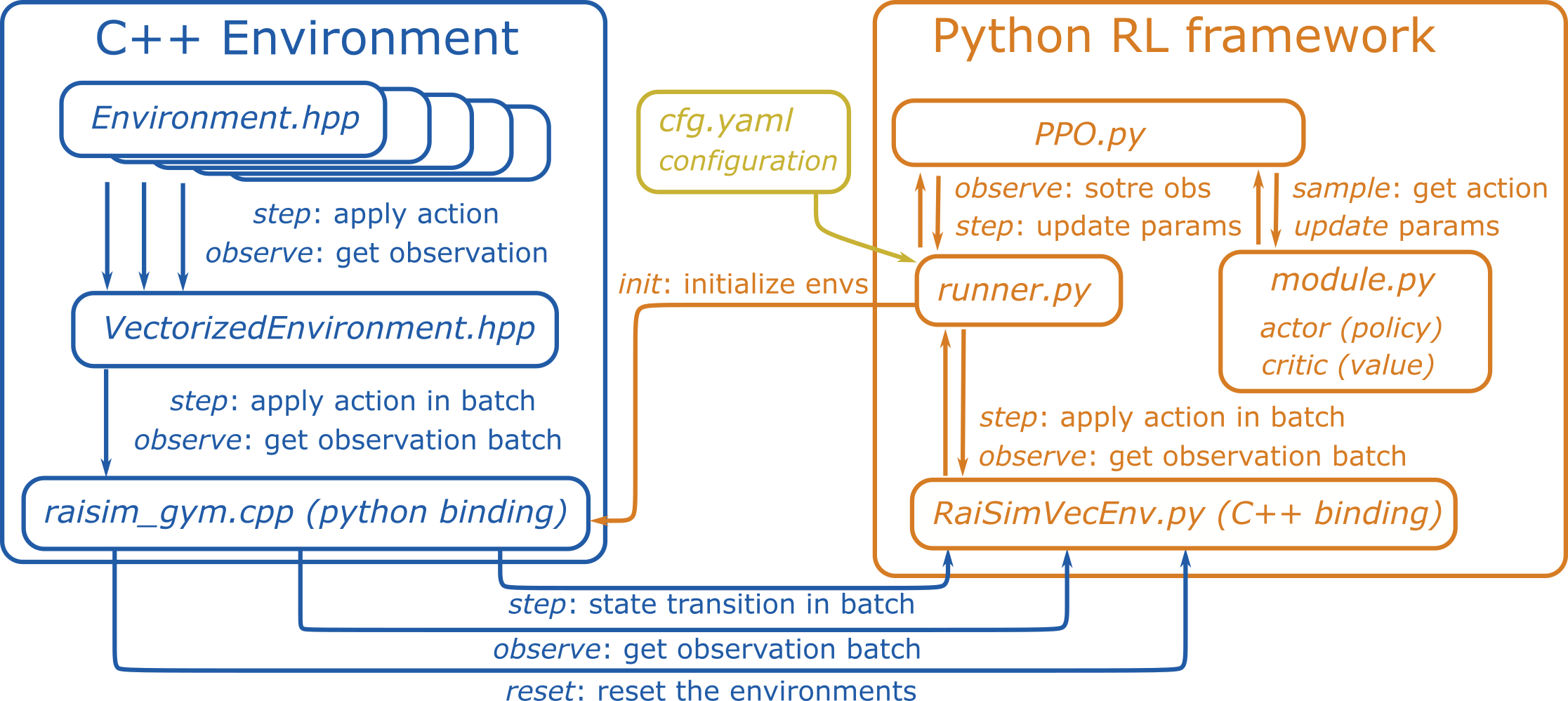
Code structure (if you are curious)
The ENVIRONMENT class defines the dynamics, reward, termination condition, and so on.
This class inherits from RaisimGymEnv, which adds basic functionality such as setSimulationTimeStep, setControlTimeStep, and getObDim.
If RaisimGymEnv is not general enough for you, you can also make ENVIRONMENT independent of RaisimGymEnv.
RaisimGymEnv is wrapped by VectorizedEnvironment, which parallelizes the environment using OpenMP when OpenMP is available.
You can consider it similar to VectorEnv in OpenAI Baselines, but RaisimGym parallelization happens in C++, which makes it orders of magnitude faster.
raisim_gym.cpp is a pybind11 wrapper for VectorizedEnvironment.
It defines the interface functions.
Finally, RaisimGymVecEnv is a Python class that wraps a Python library created from raisim_gym.cpp.
Common issues and solutions
If Python scripts complain about missing “libcudnn.so”: conda install -c nvidia cudnn