Articulated Systems
ANYmal robots (B and C versions) simulated in RaiSim.
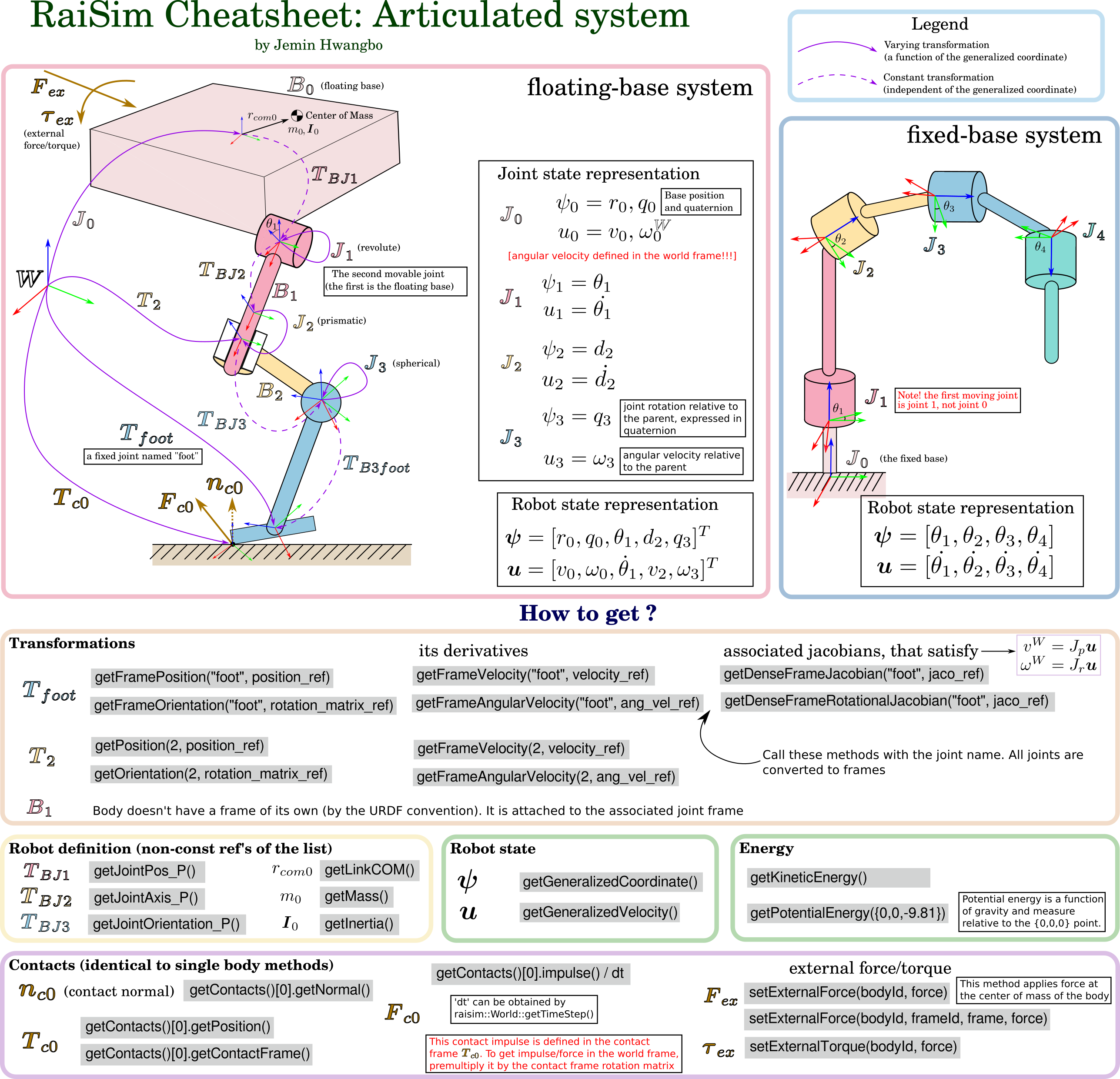
TL;DR
Click the image for vector graphics
Introduction
An articulated system comprises multiple bodies interconnected via joints. There exist two primary configurations of an articulated system: Kinematic trees and closed-loop systems. Kinematic trees are characterized by their absence of loops, ensuring that each body has only one parent joint. Consequently, the number of joints in a kinematic tree equals the number of bodies, with the provision of a floating joint on the root body for floating systems.
A closed-loop system has one or more loops. A loop means that there are multiple routes from the link to the ROOT. RaiSim’s algorithmic backbone, the Articulated Body Algorithm, cannot solve the dynamics of a closed system. However, we can simulate a closed-loop system using RaiSim’s contact solver. This section focuses on kinematic trees. An example of a closed-loop system is mentioned in Closed-loop system at the bottom of this page.
In kinematic trees, since each body has only one joint, the index of a body always matches that of its parent joint. Here, a “body” denotes a rigid body composed of one or more “links”, each of which is rigidly connected to others within the same body via fixed joints.
Creating an instance
Like any other object, an articulated system is created by the world instance using the addArticulatedSystem method.
There are four ways to specify an articulated system.
by providing the path to the URDF file (recommended)
by providing the path to the URDF template file
by providing a
std::stringcontaining the URDF text (useful when working with Xacro)by providing a
raisim::Childinstance (advanced; not recommended for beginners)
Note that option 1 and 3 use the same method. You can provide either the path string or the contents string and the class will identify which one is provided.
To use option 4, you have to provide all details of the robot in C++ code.
Child is a tree node that contains fixedBodies and child.
It also contains joint, body, and name.
All properties should be filled.
Make sure that all inertial properties are defined so that the resulting system is physically feasible.
URDF modules (optional attachments)
Articulated systems can be created from a base URDF plus one or more modules.
A module is a URDF fragment (e.g., additional links/joints/sensors) that is
inserted into the base URDF before the closing </robot> tag. This is useful
for optional payloads or sensor packs without duplicating the entire URDF.
Use the constructor that takes a list of module filenames:
std::vector<std::string> modules = {"d455.xml", "livox.xml"};
auto* robot = world.addArticulatedSystem(urdfPath, modules, resDir);
Module path resolution follows this order (first match wins):
absolute path to the module file
[baseDir]/<module>[baseDir]/modules/<module>[baseDir]/../modules/<module>[baseDir]/module/<module>[baseDir]/../module/<module>
baseDir is the URDF directory unless you pass resDir explicitly.
RaiSim writes a generated URDF named
generated_<urdf_stem>_<module_stem>[_<module_stem>...].urdf into baseDir
and loads that file.
URDF loader details
The URDF loader used by ArticulatedSystem has a few behaviors worth noting:
Base type: If the root link is named
world, RaiSim treats the system as fixed-base; otherwise it is floating-base.Sensors:
<link sensor="...">loads a sensor set XML and instantiates sensors of typergb,depth,imu, orspinning_lidar. Theupdate_rateattribute in the sensor XML is applied to each sensor. IMU sensors enable inverse dynamics internally.Constraints: A
<constraints>block with<pin>entries and anominal_configattribute is parsed and passed to the constraint system.
State Representation
The state of an articulated system can be represented by a generalized state \(\boldsymbol{S}\), which is composed of a generalized coordinate \(\boldsymbol{q}\) and a generalized velocity \(\boldsymbol{u}\). Since we are not constraining their parameterization, in general,
A generalized coordinate fully represents the configuration of the articulated system and a generalized velocity fully represents the velocity state of the articulated system. They are independently defined in general.
Every joint has a corresponding generalized coordinate and generalized velocity.
The concatenation of all joint generalized coordinates and velocities forms the generalized coordinates and velocities of the articulated system, respectively.
The order of this concatenation is called joint order.
The joint order can be accessed through getMovableJointNames().
Note the keyword “movable”.
The fixed joints contribute to neither the generalized coordinate nor the generalized velocity.
Only movable joints do.
The joint order starts with the root body which is the first body of the articulated system.
For floating-base systems, the root body is the floating base.
For fixed-base systems, the root body is the one rigidly attached to the world.
Even though the fixed base cannot move physically, users can move it using setBaseOrientation and setBasePosition.
So getMovableJointNames() method will return the fixed base name and the fixed base joint is a part of the joint order.
To set the state of the system, the following methods can be used
setGeneralizedCoordinatesetGeneralizedVelocitysetState
To obtain the state of the system, the following methods can be used
getGeneralizedCoordinategetGeneralizedVelocitygetState
The dimensions of each vector can be obtained respectively by
getGeneralizedCoordinateDimgetDOForgetGeneralizedVelocityDim.
These two methods are identical
Joints
Here are the available joints in RaiSim.
Fixed |
Floating |
Revolute |
Prismatic |
Spherical |
|
|---|---|---|---|---|---|
\(|\boldsymbol{u}|\) |
0 |
6 |
1 |
1 |
3 |
\(|\boldsymbol{q}|\) |
0 |
7 |
1 |
1 |
4 |
Velocity |
\(m/s\), \(rad/s\) |
\(rad/s\) |
\(m/s\) |
\(rad/s\) |
|
Position |
\(m\), \(rad\) |
\(rad\) |
\(m\) |
\(rad\) |
|
Force |
\(N\), \(Nm\) |
\(Nm\) |
\(N\) |
\(Nm\) |
The generalized coordinates/velocities of a joint are expressed in the joint frame and with respect to the parent body. Joint frame is the frame attached to every joint and fixed to the parent body. Parent body is the one closer to the root body among the two bodies connected via the joint. Note that the angular velocity of a floating base is also expressed in the parent frame (which is the world frame). Other libraries (e.g., RBDL) might have a different convention, so special care is required during conversion.
URDF convention
RaiSim uses a modified URDF protocol to define an articulated system. URDF files following the original convention can be read by RaiSim. However, since RaiSim offers more features, a RaiSim URDF might not be read by other libraries following the original URDF convention.
The modifications are as follows:
Capsule geometry is available for both collision objects and visual objects (with the keyword “capsule”). The geometry is defined by the “height” and “radius” keywords. The height represents the distance between the centers of the two spheres.
A <joint>/<dynamics> tag can have three more attributes: rotor_inertia, spring_mount and stiffness.
Here is an example joint with the RaiSim tags:
<joint name="link1Tolink2" type="spherical">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="0 0 -0.24"/>
<axis xyz="0 1 0"/>
<dynamics rotor_inertia="0.0001" spring_mount="0.70710678118 0 0.70710678118 0" stiffness="500.0" damping="3."/>
</joint>
Rotor_inertia in RaiSim approximately simulates the rotor inertia of the motor (but omits the resulting gyroscopic effect, which is often negligible).
It is added to the diagonal elements of the mass matrix.
It is a common way to include the inertial effect of the rotor.
You can also override it in C++ using setRotorInertia().
Since RaiSim does not know the gear ratio, you have to multiply the rotor inertia by the square of the gear ratio yourself.
In other words, the value is the reflected rotor inertia observed at the joint.
Two preprocessor features (also available in the RaiSim world configuration file) are available for the URDF template.
You can specify a variable in a form of “@@Robot_Height”. The value of this variable can be specified at runtime using
std::unordered_mapand the corresponding factory method inraisim::World.You can specify an equation instead of a variable. For example, {@@Robot_Height*@@Robot_Width*2}.
The corresponding URDF template format is shown by resources such as
rsc/templatedTrackedRobot/trackedTemplate.urdf.
In RaiSim, each body of an articulated system has a set of collision bodies and visual objects. Collision bodies contain a collision object of one of the following shapes: mesh, sphere, box, cylinder, capsule. Visual objects store specifications for visualization; the actual visualization happens in a visualizer. For details, check the URDF protocol.
Mesh collision mode for URDF
URDF does not provide a tag to choose the mesh collision mode. In RaiSim, the mode
is selected at load time with ArticulatedSystemOption::convexifyCollisionMeshes.
The default is false, which keeps each URDF collision mesh as the original
non-convex triangle mesh. Set it to true to build a convex contact mesh for
each URDF mesh collision element:
raisim::ArticulatedSystemOption options;
options.convexifyCollisionMeshes = true;
auto* robot = world.addArticulatedSystem(urdfPath, "", {}, 1, -1, options);
This articulated-system option is a simple original-mesh versus convex-mesh
choice. It does not expose the single-body CoacdOptions path. Use authored
simplified collision meshes in the URDF when you need precise control over
robot-link collision geometry. Use raisim::World::addMesh with
MeshCollisionMode::CONVEXIFY for standalone mesh objects that should use
CoACD convex decomposition:
raisim::CoacdOptions coacd;
coacd.threshold = 0.06;
coacd.maxConvexHull = 12;
auto* prop = world.addMesh(meshPath, mass, scale, "default",
raisim::MeshCollisionMode::CONVEXIFY,
raisim::CollisionGroup(1),
raisim::CollisionGroup(-1),
coacd);
For articulated robots, original non-convex triangle-mesh collision can be slower and less robust than primitive, convex, or authored collision geometry. Prefer primitive collision shapes or simplified convex mesh assets for feet, hands, wheels, and links that touch terrain frequently.
Templated URDF
You can template a URDF and create different robots by providing different parameters in C++. An example can be found here.
In the URDF template, variables should be marked with @@.
Just like in a world configuration template, you can write math expressions inside {}.
Only basic functions (i.e., sin, cos, log, exp) are available.
Template parameters should be provided at runtime in raisim::World::addArticulatedSystem.
One of the overloaded methods takes const std::unordered_map<std::string, std::string>& params as input.
The first one in the pair is the name and the second one is the parameter as a string.
Kinematics
Frames
The position and velocity of a specific point on a body of an articulated system can be obtained by attaching a frame. Frames are rigidly attached to a body of the system and have a constant position and orientation (w.r.t. parent frame). This is the recommended way to get kinematics information for a point of an articulated system in RaiSim.
All joints have a frame attached and their names are the same as the joint name. To create a custom frame, define a fixed frame at the point of interest. A dummy link with zero inertia and zero mass must be added on one side of the fixed joint to complete the kinematic tree.
A frame can be stored locally as an index in user code. For example:
#include "raisim/World.hpp"
int main() {
raisim::World world;
auto anymal = world.addArticulatedSystem(PATH_TO_URDF);
auto footFrameIndex = anymal->getFrameIdxByName("foot_joint"); // the URDF has a joint named "foot_joint"
raisim::Vec<3> footPosition, footVelocity, footAngularVelocity;
raisim::Mat<3,3> footOrientation;
anymal->getFramePosition(footFrameIndex, footPosition);
anymal->getFrameOrientation(footFrameIndex, footOrientation);
anymal->getFrameVelocity(footFrameIndex, footVelocity);
anymal->getFrameAngularVelocity(footFrameIndex, footAngularVelocity);
}
You can also store a Frame reference.
For example, you can replace getFrameIdxByName with getFrameByName in the example above.
In this way, you can access internal variables and modify them.
Modifying frames does not affect the joints.
Frames are instantiated during initialization of the articulated system instance and affect neither kinematics nor dynamics, even if you change them.
Joint limits
Joint limits can be defined in a URDF file per joint as follows:
<limit effort="80" lower="-6.28" upper="6.28" velocity="15"/>
The lower and upper are joint position limits and the velocity is the joint velocity limit.
The joint limits are implemented as if there is a hard stop at the limits.
This means that there is a hard collision (with a restitution coefficient of 0) when the joint hits a limit.
You can modify the joint position limits in C++ using raisim::ArticulatedSystem::setJointLimits().
Currently, you cannot modify the velocity joint limits in code.
During simulation, you can get information on joint limit violations using raisim::ArticulatedSystem::getJointLimitViolations.
Even though joint limits are collisions (and thus handled by a contact solver), they are not listed in raisim::Object::getContacts().
Jacobians
Jacobians of a point in RaiSim satisfy the following equation:
where \(\boldsymbol{v}\) represents the linear velocity of the associated point. If a rotational Jacobian is used, the right-hand side changes to a rotational velocity expressed in the world frame.
To get the Jacobians associated with the linear velocity, the following methods are used
getSparseJacobiangetDenseJacobian– this method only fills non-zero values. The matrix should be initialized to a zero matrix of an appropriate size.
To get the rotational Jacobians, the following methods are used
getSparseRotationalJacobiangetDenseRotationalJacobian– this method only fills non-zero values. The matrix should be initialized to a zero matrix of an appropriate size.
The main Jacobian class in RaiSim is raisim::SparseJacobian.
RaiSim uses only sparse Jacobians because it is more memory-efficient.
Note that only the joints between the child body and the root body affect the motion of the point.
The class raisim::SparseJacobian has a member idx which stores the indices of columns whose values are non-zero.
The member v stores the Jacobian except the zero columns.
In other words, ith column of v corresponds to idx[i] generalized velocity dimension.
Dynamics
All force and torque acting on the system can be represented as a single vector in the generalized velocity space. This representation is called generalized force \(\boldsymbol{\tau}\). Just like in a Cartesian coordinate (i.e., x, y, z axes), the power exerted by an articulated system is computed as a dot product of generalized force and generalized velocity (i.e., \(\boldsymbol{u}\cdot\boldsymbol{\tau}\)).
We can also combine the mass and inertia of the whole articulated system and represent them in a single matrix. This matrix is called mass matrix or inertia matrix and denoted by \(\boldsymbol{M}\). A mass matrix represents how much the articulated system resists change in generalized velocities. Naively speaking, a large mass matrix means that the articulated system experiences a low velocity change for a given generalized force.
The total kinetic energy of the system is computed as \(\frac{1}{2}\boldsymbol{u}^T\boldsymbol{M}\boldsymbol{u}\).
This quantity can be obtained by getKineticEnergy().
The total potential energy due to the gravity is a sum of \(mgh\) for all bodies.
This quantity can be obtained by getPotentialEnergy().
Note that gravity must be specified since only the world stores the gravity vector.
The equation of motion of an articulated system is shown below:
Here \(\boldsymbol{h}\) is called a non-linear term. There are three sources of force that contribute to the non-linear term: gravity, Coriolis, and centrifugal force. It is rarely useful to compute the gravity contribution to the nonlinear term alone. However, if it is needed, the most direct way is to make the same robot in another world with zero velocity. If the generalized velocity is zero, the coriolis and centrifugal contributions are zero.
The following methods are used to obtain dynamic quantities
getMassMatrix()getNonlinearities()getInverseMassMatrix()
Inverse Dynamics
RaiSim can compute inverse dynamics using the recursive Newton-Euler algorithm. It is the only option for computing the force and torque acting at joints. Joint force/torque are the sum of the constraint joint force/torque and actuation force/torque. For example, a revolute joint constrains motions in 5 degrees of freedom, which means that there are 5-dimensional constraint forces/torque and 1-dimensional joint actuation torque acting at a revolute joint.
In minimal coordinate simulation (such as RaiSim), these constraint forces/torques are not computed in the simulation loop. These forces/torques can be computed after a simulation loop using the inverse dynamics pipeline.
To enable inverse dynamics, call raisim::ArticulatedSystem::setComputeInverseDynamics(true).
This flag is set automatically if the robot has an IMU sensor.
Note that the inverse dynamics pipeline will slow down the simulation by about 10%.
After a simulation loop, you can call raisim::ArticulatedSystem::getForceAtJointInWorldFrame() and raisim::ArticulatedSystem::getTorqueAtJointInWorldFrame() to get forces and torques acting at the specified joint.
Assuming that there are no joint position/velocity limit forces acting at the joint, you can compute the joint actuation as a dot product of the joint axis and the joint torque.
The current articulated examples, such as anymal_pair and atlas, show
the current source layout for loading and stepping articulated systems.
PD Controller
When naively implemented, a PD controller can often make a robot unstable. However, this is often less problematic for robotics since this instability is also present in real systems (discrete-time control systems).
For other applications like animation and graphics, it is often desirable to have a stable PD controller when a user wants to keep the time step small. Therefore, this PD controller exploits a more stable integration scheme and can use a much smaller time step than a naive implementation.
This PD controller does not respect the actuation limits of the robot. It uses an implicit integration scheme and we do not even compute the actual torque that is applied to the joints.
To use this PD controller, set the desired control gains first:
Eigen::VectorXd pGain(robot->getDOF()), dGain(robot->getDOF());
pGain<< ...; // set your proportional gain values here
dGain<< ...; // set your differential gain values here
robot->setPdGains(pGain, dGain);
Note that the dimension of the pGain vector is the same as that of the generalized velocity NOT that of the coordinate.
Finally, the target position and the velocity can be set as follows:
Eigen::VectorXd pTarget(robot->getGeneralizedCoordinateDim()), vTarget(robot->getDOF());
pTarget<< ...; // set your position target
vTarget<< ...; // set your velocity target
robot->setPdTarget(pTarget, vTarget);
Here, the dimension of the pTarget vector is the same as that of the generalized coordinate NOT that of the velocity. This can be confusing and may seem inconsistent. However, this is a valid convention. The only reason the two dimensions differ is the quaternion representation. The quaternion target is represented by a quaternion whereas the virtual spring stiffness between the two orientations can be represented by a 3D vector, which is composed of motions in each angular velocity components.
A feedforward force term can be added by setGeneralizedForce() if desired.
This term is set to zero by default.
Note that this value is stored in the class instance and does not change unless the user specifies it so.
If this feedforward force should be applied for a single time step, set it to zero in the subsequent control loop (after the integrate() call of the world).
The theory of the implemented PD controller can be found in chapter 1.2 of this article. This document is intended for advanced users and is not required to use RaiSim.
Integration Steps
Integration of an articulated system is performed in two stages: integrate1 and integrate2.
The following steps are performed in integrate1
If the time step is changed, update the damping of the mass matrix (which reflects effective inertial increase due to springs, dampers and PD gains)
Update positions of the collision bodies
Detect collisions (called by the world instance)
The world assigns contacts on each object and computes the contact normal
Compute the mass matrix, nonlinear term, and inverse inertia matrix
Compute (Sparse) Jacobians of contacts
After this step, all kinematic/dynamic properties are computed.
Users can access them if they are necessary for the controller.
Next, integrate2 computes the rest of the simulation.
Compute contact properties
Compute PD controller (if used), add it to the feedforward force and bound it by the limits
Compute generalized forces due to springs and external forces/torques
Contact solver (called by the world instance)
Integrate the velocity
Integrate the position (in a semi-implicit way)
Get and Modify Robot Description in Code
RaiSim allows users to modify most of the robot parameters freely in code. This allows users to create randomized robot models, which might be useful for AI applications (i.e., dynamic randomization). Note that a random model might be kinematically and dynamically unrealistic. For example, joints can be locked by collision bodies. In such cases, simulation cannot be performed reliably and it is advised to carefully check randomly generated robot models.
Here is a list of modifiable kinematic/dynamic parameters.
Joint Position (relative to the parent joint) Expressed in the Parent Frame
getJointPos_P method returns (a non-const reference to) a std::vector of position vectors from the parent joint to the child joint expressed in the respective parent joint frames.
This should be changed with care since it can result in unrealistic collision geometry.
This method does not change the position of the end-effector with respect to its parent as the position of the last link is defined by the collision body position, not by the joint position.
The elements are ordered by the joint indices.
Joint Axis in the Parent Frame
getJointAxis_P method returns (a non-const reference to) a std::vector of joint axes expressed in the respective parent joint frame.
This method should also be changed with care.
The elements are ordered by the joint indices.
Mass of the Links
getMass method returns (a non-const reference to) a std::vector of link masses.
IMPORTANT! You must call :code:`updateMassInfo` after changing mass values.
The elements are ordered by the body indices (which is the same as the joint indices in RaiSim).
Center of Mass Position
getBodyCOM_B method returns (a non-const reference to) a std::vector of the COM of the bodies.
The elements are ordered by the body indices.
Link Inertia
getInertia method returns (a non-const reference to) a std::vector of link inertia.
The elements are ordered by the body indices.
Collision Bodies
getCollisionBodies method returns (a non-const reference to) a std::vector of the collision bodies.
This vector contains all collision bodies associated with the articulated system.
getCollisionBody method returns a specific collision body instead.
All collision bodies are named “LINK_NAME” + “/INDEX”.
For example, the 2nd collision body of a link named “FOOT” is named “FOOT/1” (1 because the index starts from 0).
The collision body is a class that contains the position/orientation offset from the parent joint frame, name, parent body index, and the ODE collision pointer (dGeomID, retrieved using getCollisionObject).
The collision geom can be modified using ODE methods (ODE manual).
Users can also modify the material of the collision body.
This material affects the contact dynamics.
Apply External Forces/Torques
The following two methods are used to apply external force and torque respectively
setExternalForcesetExternalTorque
You will find above methods in the API section on this page.
Collision
Apart from the collision mask and collision group set in the world, users can also disable a collision between a certain pair of links with ignoreCollisionBetween.
Types of Indices
The ArticulatedSystem class contains multiple types of indices. To query a specific quantity, you have to provide an index of the right type. The types of indices in Articulated Systems are:
Body/Joint Index: All fixed bodies are combined to a single movable body. Each movable body has a unique body index. Because there is a movable joint associated with a movable body, there is a 1-to-1 mapping between the joints and the bodies and they share the same index. For a fixed-base system, the first body rigidly fixed to the world is body-0. For a floating-base system, the floating base is body-0.
Generalized Velocity (DOF) Index: All joints are mapped to a specific set of generalized velocity indices.
Generalized Coordinate Index:
Frame Index:
Conversions Between Indices
A body index to a generalized velocity index:
ArticulatedSystem::getMappingFromBodyIndexToGeneralizedVelocityIndex()A body index to a generalized coordinate index:
ArticulatedSystem::getMappingFromBodyIndexToGeneralizedCoordinateIndex()
Closed-loop system
Before modeling a closed-loop system, it is necessary to model a corresponding spanning tree. A spanning tree is a kinematic tree that can be constructed by removing a minimum number of joints from a closed-loop system. Imagine a chain necklace. By disconnecting one of the joints, a kinematic tree will form. Only one joint should be removed because, otherwise, two separate kinematic trees will form. Note that there are multiple ways to form a kinematic tree because any of the joints can be removed.
To model a closed-loop system in RaiSim, a corresponding spanning tree should be modeled in a URDF format first. To convert the spanning tree into a closed-loop system, add pin constraints in the URDF. A pin constraint is an equality constraint that enforces two points on different bodies to occupy the same world position. Each pin is defined by:
body1andbody2: link names to be constrained.anchor: the point in the link frame of ``body1``.nominal_config: a full generalized coordinate vector used once at initialization to compute the matching anchor onbody2.
nominal_config must match the generalized coordinate order used by
getGeneralizedCoordinate() (equivalently, the joint order returned by
getMovableJointNames()). For floating-base systems, include the base
position and base quaternion first, followed by joint coordinates.
Example (minitaur) constraints block:
<constraints nominal_config="0 0 0.35 0 0 1 0 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2 -1.5708 -2.2">
<pin body1="lower_leg_front_rightR_link" body2="lower_leg_front_rightL_link" anchor="0.0 0.0 0.2"/>
<pin body1="lower_leg_front_leftR_link" body2="lower_leg_front_leftL_link" anchor="0.0 0.0 0.2"/>
<pin body1="lower_leg_back_rightR_link" body2="lower_leg_back_rightL_link" anchor="0.0 0.0 0.2"/>
<pin body1="lower_leg_back_leftR_link" body2="lower_leg_back_leftL_link" anchor="0.0 0.0 0.2"/>
</constraints>
At initialization, RaiSim sets the system to nominal_config, computes the
world position of anchor on body1, and derives the corresponding anchor
on body2. After that, the constraint is enforced every step by the contact
solver.
Contact solver handling
Closed-loop pin constraints are injected into the same contact solver that handles collisions. Internally, pin constraints are treated as special contact problems (rank-1/2/3 pin constraints) and are solved with impulse updates each iteration. A small ERP term corrects residual position error at every step. The contact solver itself uses a bisection-based method for frictional contacts; pin constraints bypass friction handling and are solved as equality constraints inside the same loop. This makes closed-loop systems numerically robust in RaiSim, because the loop constraints are enforced through the same stabilized contact solver that resolves impacts and friction.
An example of a closed-loop system URDF can be found here.
API
-
class ArticulatedSystem : public raisim::Object
Public Functions
-
inline const raisim::VecDyn &getGeneralizedCoordinate() const
- Returns:
generalized coordinate of the system
-
inline const raisim::VecDyn &getGeneralizedVelocity() const
- Returns:
generalized velocity of the system
-
inline const raisim::VecDyn &getGeneralizedAcceleration() const
- Returns:
generalized acceleration of the system. The generalized acceleration is computed in the integration step. So this function does not work properly if you have not integrated the world.
-
void getBaseOrientation(raisim::Vec<4> &quaternion) const
- Parameters:
quaternion – [out] orientation of base
-
inline void getBaseOrientation(raisim::Mat<3, 3> &rotataionMatrix) const
- Parameters:
rotataionMatrix – [out] orientation of base
-
inline const raisim::Mat<3, 3> &getBaseOrientation() const
- Returns:
orientation of base
-
inline void getBasePosition(raisim::Vec<3> &position) const
- Parameters:
position – [out] position of base
-
inline raisim::Vec<3> getBasePosition() const
- Returns:
position of base
-
void updateKinematics()
unnecessary to call this function if you are simulating your system. integrate1 calls this function Call this function if you want to get kinematic properties but you don’t want to integrate.
-
inline void setGeneralizedCoordinate(const Eigen::VectorXd &jointState)
set gc of each joint in order
- Parameters:
jointState – [in] generalized coordinate
-
inline void setGeneralizedCoordinate(const raisim::VecDyn &jointState)
set gc of each joint in order
- Parameters:
jointState – [in] generalized coordinate
-
inline void setGeneralizedVelocity(const Eigen::VectorXd &jointVel)
set the generalized velocity
- Parameters:
jointVel – [in] the generalized velocity
-
inline void setGeneralizedVelocity(const raisim::VecDyn &jointVel)
set the generalized velocity
- Parameters:
jointVel – [in] the generalized velocity
-
void setGeneralizedCoordinate(std::initializer_list<double> jointState)
set the generalized coordinsate of each joint in order.
- Parameters:
jointState – [in] the generalized coordinate
-
void setGeneralizedVelocity(std::initializer_list<double> jointVel)
set the generalized velocity of each joint in order
- Parameters:
jointVel – [in] the generalized velocity
-
void setGeneralizedForce(std::initializer_list<double> tau)
This is feedforward generalized force. In the PD control mode, this differs from the actual generalizedForce the dimension should be the same as dof.
- Parameters:
tau – [in] the generalized force. If the built-in PD controller is active, this force is added to the generalized force from the PD controller
-
inline void setGeneralizedForce(const raisim::VecDyn &tau)
This is feedforward generalized force. In the PD control mode, this differs from the actual generalizedForce the dimension should be the same as dof.
- Parameters:
tau – [in] the generalized force. If the built-in PD controller is active, this force is added to the generalized force from the PD controller
-
inline void setGeneralizedForce(const Eigen::VectorXd &tau)
This is feedforward generalized force. In the PD control mode, this differs from the actual generalizedForce the dimension should be the same as dof.
- Parameters:
tau – [in] the generalized force. If the built-in PD controller is active, this force is added to the generalized force from the PD controller
-
inline void getState(Eigen::VectorXd &genco, Eigen::VectorXd &genvel) const
get both the generalized coordinate and the generalized velocity
- Parameters:
genco – [out] the generalized coordinate
genvel – [out] the generalized velocity
-
inline void getState(VecDyn &genco, VecDyn &genvel) const
get both the generalized coordinate and the generalized velocity
- Parameters:
genco – [out] the generalized coordinate
genvel – [out] the generalized velocity
-
inline void setState(const Eigen::VectorXd &genco, const Eigen::VectorXd &genvel)
set both the generalized coordinate and the generalized velocity. This updates the kinematics and removes previously computed contact points
- Parameters:
genco – [in] the generalized coordinate
genvel – [in] the generalized velocity
-
inline VecDyn getGeneralizedForce() const
Generalized user-set gen force (using setGeneralizedForce()). This method a small error when the built-in PD controller is used. The PD controller is implicit (using a continuous, linear model) so we cannot get the true gen force. But if you set the time step small enough, the difference is negligible.
- Returns:
the generalized force
-
inline const VecDyn &getFeedForwardGeneralizedForce() const
get the feedfoward generalized force (which is set by the user)
- Returns:
the feedforward generalized force
-
inline const MatDyn &getMassMatrix()
get the mass matrix
- Returns:
the mass matrix. Check Object/ArticulatedSystem section in the manual
-
inline const VecDyn &getNonlinearities(const Vec<3> &gravity)
get the coriolis and the gravitational term
- Parameters:
gravity – [in] gravitational acceleration. You should get this value from the world.getGravity();
- Returns:
the coriolis and the gravitational term. Check Object/ArticulatedSystem section in the manual
-
inline const MatDyn &getInverseMassMatrix()
get the inverse mass matrix. Note that this is actually damped inverse. It contains the effect of damping and the spring effects due to the implicit integration. YOU MUST CALL getMassMatrix FIRST BEFORE CALLING THIS METHOD.
- Returns:
the inverse mass matrix. Check Object/ArticulatedSystem section in the manual
-
inline const std::vector<raisim::Vec<3>> &getCompositeCOM() const
get the center of mass of a composite body containing body i and all its children. if you want the COM of the whole robot, just take the first element This only works if you have called getMassMatrix() with the current state
- Returns:
the center of mass of the composite body
-
inline Vec<3> getCOM() const
get the center of mass of the whole system
- Returns:
the center of mass of the system
-
inline const std::vector<raisim::Mat<3, 3>> &getCompositeInertia() const
get the current composite inertia of a composite body containing body i and all its children
- Returns:
the inertia of the composite system
-
inline const std::vector<double> &getCompositeMass() const
get the current composite mass of a composite body containing body i and all its children
- Returns:
get the composite mass
-
inline Vec<3> getLinearMomentum() const
linear momentum of the whole system
- Returns:
momentum
-
inline const VecDyn &getGeneralizedMomentum() const
returns the generalized momentum which is M * u It is already computed in “integrate1()” so you don’t have to compute again.
- Returns:
the generalized momentum
-
double getEnergy(const Vec<3> &gravity)
- Parameters:
gravity – [in] gravitational acceleration
- Returns:
the sum of potential/kinetic energy given the gravitational acceleration
-
double getKineticEnergy()
- Returns:
the kinetic energy.
-
double getPotentialEnergy(const Vec<3> &gravity) const
- Parameters:
gravity – [in] gravitational acceleration
- Returns:
the potential energy (relative to zero height) given the gravity vector
-
void getAngularMomentum(const Vec<3> &referencePoint, Vec<3> &angularMomentum) const
- Parameters:
referencePoint – [in] the reference point about which the angular momentum is computed
angularMomentum – [in] angular momentum about the reference point
-
void printOutBodyNamesInOrder() const
bodies here means moving bodies. Fixed bodies are optimized out
-
void printOutMovableJointNamesInOrder() const
print out movable joint names in order
-
void printOutFrameNamesInOrder() const
frames are attached to every joint coordinate
-
inline const std::vector<std::string> &getMovableJointNames() const
getMovableJointNames. Note! the order doesn’t correspond to dof since there are joints with multiple dof’s
- Returns:
movable joint names in the joint order.
-
inline size_t getGeneralizedVelocityIndex(const std::string &name) const
get generalized velocity index of a joint.
- Returns:
the joint index.
-
virtual void getPosition(size_t bodyIdx, const Vec<3> &point_B, Vec<3> &point_W) const final
- Parameters:
bodyIdx – [in] The body which contains the point, can be retrieved by getBodyIdx()
point_B – [in] The position of the point in the body frame
point_W – [out] The position of the point in the world frame
- Returns:
position in the world frame of a point defined in a joint frame
-
inline CoordinateFrame &getFrameByName(const std::string &nm)
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details
- Parameters:
nm – [in] name of the frame
- Returns:
the coordinate frame of the given name
-
inline CoordinateFrame &getFrameByLinkName(const std::string &name)
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details
- Parameters:
name – [in] name of the urdf link that is a child of the joint
- Returns:
the coordinate frame of the given link name
-
inline size_t getFrameIdxByLinkName(const std::string &name) const
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details
- Parameters:
name – [in] name of the urdf link that is a child of the joint
- Returns:
the coordinate frame index of the given link name
-
inline CoordinateFrame &getFrameByIdx(size_t idx)
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details
- Parameters:
idx – [in] index of the frame
- Returns:
the coordinate frame of the given index
-
size_t getFrameIdxByName(const std::string &nm) const
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details The frame can be retrieved as as->getFrames[index]. This way is more efficient than above methods that use the frame name
- Parameters:
nm – [in] name of the frame
- Returns:
the index of the coordinate frame of the given index. Returns size_t(-1) if it doesn’t exist
-
inline std::vector<CoordinateFrame> &getFrames()
Refer to Object/ArticulatedSystem/Kinematics/Frame in the manual for details The frame can be retrieved as as->getFrames[index]. This way is more efficient than above methods that use the frame name
- Returns:
a vector of the coordinate frames
-
void getFramePosition(size_t frameId, Vec<3> &point_W) const
- Parameters:
frameId – [in] the frame id which can be obtained by getFrameIdxByName()
point_W – [out] the position of the frame expressed in the world frame
-
void getPositionInFrame(size_t frameId, const Vec<3> &localPos, Vec<3> &point_W) const
- Parameters:
frameId – [in] the frame id which can be obtained by getFrameIdxByName()
localPos – [in] local position in the specified frame
point_W – [out] the position expressed in the world frame
-
void getFrameOrientation(size_t frameId, Mat<3, 3> &orientation_W) const
- Parameters:
frameId – [in] the frame id which can be obtained by getFrameIdxByName()
orientation_W – [out] the position of the frame relative to the world frame
-
void getFrameVelocity(size_t frameId, Vec<3> &vel_W) const
- Parameters:
frameId – [in] the frame id which can be obtained by getFrameIdxByName()
vel_W – [out] the linear velocity of the frame expressed in the world frame
-
void getFrameAngularVelocity(size_t frameId, Vec<3> &angVel_W) const
- Parameters:
frameId – [in] the frame id which can be obtained by getFrameIdxByName()
angVel_W – [out] the angular velocity of the frame expressed in the world frame
-
inline void getFramePosition(const std::string &frameName, Vec<3> &point_W) const
- Parameters:
frameName – [in] the frame name (defined in the urdf)
point_W – [out] the position of the frame expressed in the world frame
-
inline void getFrameOrientation(const std::string &frameName, Mat<3, 3> &orientation_W) const
- Parameters:
frameName – [in] the frame name (defined in the urdf)
orientation_W – [out] the orientation of the frame relative to the world frame
-
inline void getFrameVelocity(const std::string &frameName, Vec<3> &vel_W) const
- Parameters:
frameName – [in] the frame name (defined in the urdf)
vel_W – [out] the linear velocity of the frame expressed in the world frame
-
inline void getFrameAngularVelocity(const std::string &frameName, Vec<3> &angVel_W) const
- Parameters:
frameName – [in] the frame name (defined in the urdf)
angVel_W – [out] the angular velocity of the frame relative to the world frame
-
void getFramePosition(const CoordinateFrame &frame, Vec<3> &point_W) const
- Parameters:
frame – [in] custom frame defined by the user
point_W – [out] the position of the frame relative to the world frame
-
void getFrameOrientation(const CoordinateFrame &frame, Mat<3, 3> &orientation_W) const
- Parameters:
frame – [in] custom frame defined by the user
orientation_W – [out] the orientation of the frame relative to the world frame
-
void getFrameVelocity(const CoordinateFrame &frame, Vec<3> &vel_W) const
- Parameters:
frame – [in] custom frame defined by the user
vel_W – [out] the linear velocity of the frame expressed to the world frame
-
void getFrameAngularVelocity(const CoordinateFrame &frame, Vec<3> &angVel_W) const
- Parameters:
frame – [in] custom frame defined by the user
angVel_W – [out] the angular velocity of the frame expressed to the world frame
-
inline void getFrameAcceleration(const std::string &frameName, Vec<3> &acc_W) const
YOU NEED TO ENABLE INVERSEDYNAMICS COMPUTATION TO USE THIS METHOD This is time derivative of (body velocity expressed in the world frame). If you premultiply this by the transpose of the rotation matrix of the frame, it is the same as what your accelerometer sensor will measure if you place it at the frame (but an IMU has gravity bias so they will be off by the gravitational acceleration). This is not the same as {(time derivative of body velocity expressed in the body frame) expressed in the world frame}
- Parameters:
frameName – [in] name of the frame
acc_W – [out] the linear acceleration of the frame expressed in the world frame
-
inline void getFrameAcceleration(const CoordinateFrame &frame, Vec<3> &acc_W) const
YOU NEED TO ENABLE INVERSEDYNAMICS COMPUTATION TO USE THIS METHOD This is time derivative of (body velocity expressed in the world frame). If you premultiply this by the transpose of the rotation matrix of the frame, it is the same as what your accelerometer sensor will measure if you place it at the frame. (but an IMU has gravity bias so they will be off by the gravitational acceleration). This is not the same as {(time derivative of body velocity expressed in the body frame) expressed in the world frame}
- Parameters:
frame – [in] custom frame defined by the user
acc_W – [out] the linear acceleration of the frame expressed in the world frame
-
inline virtual void getPosition(size_t bodyIdx, Vec<3> &pos_w) const final
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
pos_w – [out] the position of the joint (after its own joint transformation)
-
void getPositionInBodyCoordinate(size_t bodyIdx, const Vec<3> &pos_W, Vec<3> &pos_B)
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
pos_W – [in] the position in the world coordinate. This position does not have to be physically on the body.
pos_B – [out] the position in the body frame
-
inline virtual void getOrientation(size_t bodyIdx, Mat<3, 3> &rot) const final
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
rot – [out] the orientation of the joint (after its own joint transformation)
-
inline virtual void getVelocity(size_t bodyIdx, Vec<3> &vel_w) const final
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
vel_w – [out] the linear velocity of the joint (after its own joint transformation)
-
inline void getAngularVelocity(size_t bodyIdx, Vec<3> &angVel_w) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
angVel_w – [out] the angular velocity of the joint (after its own joint transformation)
-
void getSparseJacobian(size_t bodyIdx, const Vec<3> &point_W, SparseJacobian &jaco) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
point_W – [in] the point expressed in the world frame. If you want to use a point expressed in the body frame, use getDenseFrameJacobian()
jaco – [out] the positional Jacobian. v = J * u. v is the linear velocity expressed in the world frame and u is the generalized velocity
-
void getSparseJacobian(size_t bodyIdx, Frame frame, const Vec<3> &point, SparseJacobian &jaco) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
frame – [in] the frame in which the position of the point is expressed in
point – [in] the point expressed in the world frame. If you want to use a point expressed in the body frame, use getDenseFrameJacobian()
jaco – [out] the positional Jacobian. v = J * u. v is the linear velocity expressed in the world frame and u is the generalized velocity
-
void getSparseRotationalJacobian(size_t bodyIdx, SparseJacobian &jaco) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
jaco – [out] the rotational Jacobian. omega = J * u. omgea is the angular velocity expressed in the world frame and u is the generalized velocity
-
void getTimeDerivativeOfSparseJacobian(size_t bodyIdx, Frame frame, const Vec<3> &point, SparseJacobian &jaco) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
frame – [in] the frame in which the position of the point is expressed
point – [in] the position of the point of interest
jaco – [out] the time derivative of the positional Jacobian. a = dJ * u + J * du. a is the linear acceleration expressed in the world frame, u is the generalized velocity and d denotes the time derivative
-
void getTimeDerivativeOfSparseRotationalJacobian(size_t bodyIdx, SparseJacobian &jaco) const
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint. It can be retrieved by getBodyIdx()
jaco – [out] the rotational Jacobian. alpha = dJ * u + J * du. alpha is the angular acceleration expressed in the world frame, u is the generalized velocity and d denotes the time derivative
-
inline void getDenseJacobian(size_t bodyIdx, const Vec<3> &point_W, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
bodyIdx – [in] the body index. Note that body index and the joint index are the same because every body has one parent joint
point_W – [in] the point expressed in the world frame. If you want to use a point expressed in the body frame, use getDenseFrameJacobian()
jaco – [out] the dense positional Jacobian
-
inline void getDenseRotationalJacobian(size_t bodyIdx, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
jaco – [out] the dense rotational Jacobian
-
inline void getDenseFrameJacobian(size_t frameIdx, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
frameIdx – [in] the frame index. it can be retrieved by getFrameIdxByName()
jaco – [out] the dense positional Jacobian
-
inline void getDenseFrameJacobian(const std::string &frameName, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
frameName – [in] the frame name. (defined in the URDF)
jaco – [out] the dense positional Jacobian
-
inline void getDenseFrameRotationalJacobian(size_t frameIdx, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
frameIdx – [in] the frame index. it can be retrieved by getFrameIdxByName()
jaco – [out] the dense rotational Jacobian
-
inline void getDenseFrameRotationalJacobian(const std::string &frameName, Eigen::MatrixXd &jaco) const
This method only fills out non-zero elements. Make sure that the jaco is setZero() once in the initialization!
- Parameters:
frameName – [in] the frame name. (defined in the URDF)
jaco – [out] the dense rotational Jacobian
-
inline IKResult solveIK(const std::string &frameName, const Vec<3> &targetPosition)
Solve inverse kinematics for a named frame using the current articulated-system state, frame FK, and dense frame Jacobians. By default, the solution is applied on success. The returned solution is a generalized coordinate vector. Currently supports dls, pinv, svd, and transpose inverse methods.
-
inline IKResult solveIK(const std::string &frameName, const Vec<3> &targetPosition, const Mat<3, 3> &targetOrientation, IKOptions options)
Solve inverse kinematics for a named frame with a position and orientation target. This overload always enables the orientation task.
-
inline IKResult solveIK(size_t frameIdx, const Vec<3> &targetPosition)
Solve inverse kinematics for a frame index using the current articulated-system state.
-
IKResult solveIK(size_t frameIdx, const Vec<3> &targetPosition, const Mat<3, 3> &targetOrientation, const IKOptions &options)
Solve inverse kinematics for a frame index with a position and optional orientation target. Set options.useOrientation=true to activate the orientation target.
-
void getVelocity(const SparseJacobian &jaco, Vec<3> &pointVel) const
- Parameters:
jaco – [in] the Jacobian associated with the point of interest
pointVel – [out] the velocity of the point expressed in the world frame
-
virtual void getVelocity(size_t bodyIdx, const Vec<3> &posInBodyFrame, Vec<3> &pointVel) const final
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
posInBodyFrame – [in] the position of the point of interest expressed in the body frame
pointVel – [out] the velocity of the point expressed in the world frame
-
void getVelocity(size_t bodyIdx, Frame frameOfPos, const Vec<3> &pos, Frame frameOfVel, Vec<3> &pointVel) const
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
frameOfPos – [in] the frame in which the provided position is expressed
pos – [in] the position of the point of interest
frameOfVel – [in] the frame in which the computed velocity is expressed
pointVel – [out] the velocity of the point expressed in the world frame
-
size_t getBodyIdx(const std::string &nm) const
returns the index of the body
- Parameters:
nm – [in] name of the body. The body name is the name of the movable link of the body
- Returns:
the index of the body. Returns size_t(-1) if the body doesn’t exist.
-
size_t getDOF() const
- Returns:
the degrees of freedom
-
size_t getGeneralizedVelocityDim() const
- Returns:
the dimension of generalized velocity (do the same thing with getDOF)
-
size_t getGeneralizedCoordinateDim() const
- Returns:
the dimension of generalized coordinate
-
inline void getBodyPose(size_t bodyIdx, Mat<3, 3> &orientation, Vec<3> &position) const
The body pose is the pose of its parent joint (after its joint transformation)
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
orientation – [out] the orientation of the body
position – [out] the position of the body
-
inline void getBodyPosition(size_t bodyIdx, Vec<3> &position) const
The body position is the position of its parent joint (after its joint transformation)
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
position – [out] the position of the body
-
inline void getBodyOrientation(size_t bodyIdx, Mat<3, 3> &orientation) const
The body orientation is the orientation of its parent joint (after its joint transformation)
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
orientation – [out] the orientation of the body
-
inline std::vector<raisim::Vec<3>> &getJointPos_P()
The following 5 methods can be used to directly modify dynamic/kinematic properties of the robot. They are made for dynamic randomization. Use them with caution since they will change the the model permenantly. After you change the dynamic properties, call “void updateMassInfo()” to update some precomputed dynamic properties
- Returns:
a reference to joint position relative to its parent, expressed in the parent frame.
-
inline std::vector<raisim::Mat<3, 3>> &getJointOrientation_P()
- Returns:
a reference to joint orientation relative to its parent.
-
inline std::vector<raisim::Vec<3>> &getJointAxis_P()
- Returns:
a reference to joint axis relative to its parent, expressed in the parent frame.
-
inline const raisim::Vec<3> &getJointAxis(size_t idx) const
- Returns:
a reference to joint axis expressed in the world frame.
-
inline std::vector<double> &getMass()
You MUST call updateMassInfo() after you change the mass
- Returns:
a reference to mass of each body.
-
inline std::vector<raisim::Mat<3, 3>> &getInertia()
- Returns:
a reference to inertia of each body.
-
inline std::vector<raisim::Vec<3>> &getBodyCOM_B()
- Returns:
a reference to the position of the center of the mass of each body in the body frame.
-
inline std::vector<raisim::Vec<3>> &getBodyCOM_W()
- Returns:
a reference to the position of the center of the mass of each body in the world frame.
-
inline raisim::CollisionSet &getCollisionBodies()
- Returns:
a reference to the collision bodies. Position and orientation can be set dynamically
-
inline raisim::CollisionDefinition &getCollisionBody(const std::string &name)
- Parameters:
name – collision body name which is “LINK_NAME” + “/” + “COLLISION_NUMBER”. For example, the first collision body of the link “base” is named as “base/0”
- Returns:
a reference to the collision bodies. Position and orientation can be set dynamically
-
void updateMassInfo()
This method updates the precomputed composite mass. Call this method after you change link mass. This also updates the center of mass without integration
-
inline virtual double getMass(size_t bodyIdx) const final
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
- Returns:
mass of the body
-
inline void setMass(size_t bodyIdx, double value)
set body mass. It is indexed for each body, not for individual link. Check this link (https://raisim.com/sections/ArticulatedSystem.html#introduction) to understand the difference between a link and a body
-
inline double getTotalMass() const
- Returns:
the total mass of the system.
-
virtual void setExternalForce(size_t bodyIdx, const Vec<3> &force) final
set external forces or torques expressed in the world frame acting on the COM of the body. The external force is applied for a single time step only. You have to apply the force for every time step if you want persistent force
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
force – [in] force applied to the body (at the center of mass)
-
void setExternalForce(size_t bodyIdx, Frame frameOfForce, const Vec<3> &force, Frame frameOfPos, const Vec<3> &pos)
set external force acting on the point specified The external force is applied for a single time step only. You have to apply the force for every time step if you want persistent force
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
frameOfForce – [in] the frame in which the force is expressed. Options: Frame::WORLD_FRAME, Frame::PARENT_FRAME or Frame::BODY_FRAME
force – [in] the applied force
frameOfPos – [in] the frame in which the position vector is expressed. Options: Frame::WORLD_FRAME, Frame::PARENT_FRAME or Frame::BODY_FRAME
pos – [in] position at which the force is applied
-
inline virtual void setExternalForce(size_t bodyIdx, const Vec<3> &pos, const Vec<3> &force) final
set external force (expressed in the world frame) acting on the point (expressed in the body frame) specified The external force is applied for a single time step only. You have to apply the force for every time step if you want persistent force
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
force – [in] the applied force
pos – [in] position at which the force is applied
-
inline void setExternalForce(const std::string &frame_name, const Vec<3> &force)
set external force (expressed in the world frame) acting on the point specified by the frame The external force is applied for a single time step only. You have to apply the force for every time step if you want persistent force
- Parameters:
frame_name – [in] the name of the frame where you want to applied the force. The force is applied to the origin of the frame, on the body where the frame is attached to.
force – [in] the applied force in the world frame
-
virtual void setExternalTorque(size_t bodyIdx, const Vec<3> &torque_in_world_frame) final
set external torque. The external torque is applied for a single time step only. You have to apply the force for every time step if you want persistent torque
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
torque_in_world_frame – [in] the applied torque expressed in the world frame
-
inline void setExternalTorqueInBodyFrame(size_t bodyIdx, const Vec<3> &torque_in_body_frame)
set external torque. The external torque is applied for a single time step only. You have to apply the force for every time step if you want persistent torque
- Parameters:
bodyIdx – [in] the body index. it can be retrieved by getBodyIdx()
torque_in_body_frame – [in] the applied torque expressed in the body frame
-
virtual void getContactPointVel(size_t contactId, Vec<3> &vel) const final
returns the contact point velocity. The contactId is the order in the vector from Object::getContacts()
- Parameters:
contactId – [in] index of the contact vector which can be obtained by getContacts()
vel – [out] the contact point velocity
-
inline void setControlMode(ControlMode::Type mode)
- Parameters:
mode – [in] control mode. Can be either ControlMode::FORCE_AND_TORQUE or ControlMode::PD_PLUS_FEEDFORWARD_TORQUE
-
inline ControlMode::Type getControlMode() const
- Returns:
control mode. Can be either ControlMode::FORCE_AND_TORQUE or ControlMode::PD_PLUS_FEEDFORWARD_TORQUE
-
inline void setPdTarget(const Eigen::VectorXd &posTarget, const Eigen::VectorXd &velTarget)
set PD targets.
- Parameters:
posTarget – [in] position target
velTarget – [in] velocity target
-
inline void getPdTarget(Eigen::VectorXd &posTarget, Eigen::VectorXd &velTarget)
get PD targets.
- Parameters:
posTarget – [out] position target
velTarget – [out] velocity target
-
inline void setPdTarget(const raisim::VecDyn &posTarget, const raisim::VecDyn &velTarget)
set PD targets.
- Parameters:
posTarget – [in] position target (dimension == getGeneralizedCoordinateDim())
velTarget – [in] velocity target (dimension == getDOF())
-
template<class T>
inline void setPTarget(const T &posTarget) set P targets.
- Parameters:
posTarget – [in] position target (dimension == getGeneralizedCoordinateDim())
-
template<class T>
inline void setDTarget(const T &velTarget) set D targets.
- Parameters:
velTarget – [in] velocity target (dimension == getDOF())
-
inline void setPdGains(const Eigen::VectorXd &pgain, const Eigen::VectorXd &dgain)
set PD gains.
-
inline void getPdGains(Eigen::VectorXd &pgain, Eigen::VectorXd &dgain)
get PD gains.
-
inline void setPdGains(const raisim::VecDyn &pgain, const raisim::VecDyn &dgain)
set PD gains.
-
template<class T>
inline void setPGains(const T &pgain) set P gain.
- Parameters:
pgain – [in] position gain (dimension == getDOF())
-
template<class T>
inline void setDGains(const T &dgain) set D gains.
- Parameters:
dgain – [in] velocity gain (dimension == getDOF())
-
inline void setJointDamping(const Eigen::VectorXd &dampingCoefficient)
passive elements at the joints. They can be specified in the URDF file as well. Check Object/ArticulatedSystem/URDF convention in the manual
- Parameters:
dampingCoefficient – [in] the damping coefficient vector, acting at each degrees of freedom
-
inline void setJointDamping(const raisim::VecDyn &dampingCoefficient)
passive elements at the joints. They can be specified in the URDF file as well. Check Object/ArticulatedSystem/URDF convention in the manual
- Parameters:
dampingCoefficient – [in] the damping coefficient vector, acting at each degrees of freedom
-
void computeSparseInverse(const MatDyn &M, MatDyn &Minv) noexcept
This computes the inverse mass matrix given the mass matrix. The return type is dense. It exploits the sparsity of the mass matrix to efficiently perform the computation. The outcome also contains effects of the joint damping and strings
- Parameters:
M – [in] mass matrix
Minv – [out] inverse mass matrix
-
inline void massMatrixVecMul(const VecDyn &vec1, VecDyn &vec) const
this method exploits the sparsity of the mass matrix. If the mass matrix is nearly dense, it will be slower than your ordinary matrix multiplication which is probably vectorized vec = M * vec1
- Parameters:
vec – [in] input vector
vec1 – [out] output vector
-
void ignoreCollisionBetween(size_t bodyIdx1, size_t bodyIdx2)
The bodies specified here will not collide
- Parameters:
bodyIdx1 – [in] first body index
bodyIdx2 – [in] second body index
-
void updateSelfCollisionCache(World &world)
Refresh contact body metadata in the world contact detector. Call this after changing collision ignore settings at runtime.
- Parameters:
world – [in] the world that owns this articulated system
-
inline ArticulatedSystemOption getOptions() const
Currently only supports “DO_NOT_COLLIDE_WITH_PARENT”
- Returns:
articulated system option
-
inline const std::vector<std::string> &getBodyNames() const
- Returns:
a vector of body names (following the joint order)
-
inline std::vector<VisObject> &getVisOb()
- Returns:
a vector of visualized bodies
-
inline std::vector<VisObject> &getVisColOb()
- Returns:
a vector of visualized collision bodies
-
inline void getVisObPose(size_t visObjIdx, Mat<3, 3> &rot, Vec<3> &pos) const
- Parameters:
visObjIdx – [in] visual object index. Following the order specified by the vector getVisOb()
rot – [out] orientation
pos – [out] position
-
inline void getVisColObPose(size_t visColObjIdx, Mat<3, 3> &rot, Vec<3> &pos) const
- Parameters:
visColObjIdx – [in] visual collision object index. Following the order specified by the vector getVisColOb()
rot – [out] orientation
pos – [out] position
-
inline const std::string &getResourceDir() const
- Returns:
the resource directory (for mesh files, textures, etc)
-
inline const std::string &getRobotDescriptionfFileName() const
- Returns:
the resource directory (for mesh files, textures, etc)
-
inline const std::string &getRobotDescriptionfTopDirName() const
- Returns:
the name of the URDF file (returns empty string if the robot was not specified by a URDF file)
-
inline const std::string &getRobotDescriptionFullPath() const
- Returns:
the full path to the URDF file (returns empty string if the robot was not specified by a URDF file)
-
inline const std::string &getRobotDescription() const
- Returns:
if the object was instantiated with raw URDF string, it returns the string
-
inline void exportRobotDescriptionToURDF(const std::string &filePath) const
if the object was instantiated with raw URDF string, it exports the robot description to an URDF file
- Parameters:
filePath – [in] Path where the file is generated
-
inline void setBasePos_e(const Eigen::Vector3d &pos)
set the base position using an eigen vector
- Parameters:
pos – [in] position of the base
-
inline void setBaseOrientation_e(const Eigen::Matrix3d &rot)
set the base orientation using an eigen vector
- Parameters:
rot – [in] orientation of the base
-
void setBasePos(const Vec<3> &pos)
set the base position using an eigen vector
- Parameters:
pos – [in] position of the base
-
void setBaseOrientation(const Mat<3, 3> &rot)
set the base orientation using a raisim rotation matrix (i.e., Mat<3,3>)
- Parameters:
rot – [in] orientation of the base
-
void setBaseOrientation(const Vec<4> &quat)
set the base orientation using a raisim quaternion (i.e., Vec<4>)
- Parameters:
quat – [in] orientation of the base
-
void setBaseVelocity(const Vec<3> &vel)
set the base position using an eigen vector
- Parameters:
vel – [in] the linear velocity of the base
-
void setBaseAngularVelocity(const Vec<3> &vel)
set the base position using an eigen vector
- Parameters:
vel – [in] the angular velocity of the base
-
inline void setActuationLimits(const Eigen::VectorXd &upper, const Eigen::VectorXd &lower)
set limits in actuation force. It can be also specified in the URDF file
- Parameters:
upper – [in] upper joint force/torque limit
lower – [in] lower joint force/torque limit
-
inline const VecDyn &getActuationUpperLimits() const
- Returns:
the upper joint torque/force limit
-
inline const VecDyn &getActuationLowerLimits() const
- Returns:
the lower joint torque/force limit
-
void setCollisionBodyShapeParameters(size_t id, const Vec<4> ¶ms)
change collision geom parameters.
- Parameters:
id – [in] collision object id
params – [in] collision object parameters (depending on the object). For a sphere, {raidus}. For a cylinder and a capsule, {radius, length} For a box, {x-dim, y-dim, z-dim}
-
void setCollisionBodyPositionOffset(size_t id, const Vec<3> &posOffset)
change collision geom offset from the joint position.
- Parameters:
id – [in] collision object id
posOffset – [in] the position vector expressed in the joint frame
-
void setCollisionBodyOrientationOffset(size_t id, const Mat<3, 3> &oriOffset)
change collision geom orientation offset from the joint frame.
- Parameters:
id – [in] collision object id
oriOffset – [in] the orientation relative to the joint frame
-
inline void setRotorInertia(const VecDyn &rotorInertia)
rotor inertia is a term added to the diagonal of the mass matrix. This approximates the rotor inertia. Note that this is not exactly equivalent in dynamics (due to gyroscopic effect). but it is a commonly used approximation. It can also be expressed in the URDF file
- Parameters:
rotorInertia – [in] the rotor inertia
-
inline const VecDyn &getRotorInertia() const
rotor inertia is a term added to the diagonal of the mass matrix. This approximates the rotor inertia. Note that this is not exactly equivalent in dynamics (due to gyroscopic effect). but it is a commonly used approximation. It can also be expressed in the URDF file
- Returns:
the rotor inertia
-
inline Joint::Type getJointType(size_t jointIndex)
This joint indices are in the same order as the elements of the generalized velocity However, some joints have multiple degrees of freedom and they are not equal
- Parameters:
jointIndex – [in] the joint index
- Returns:
the joint type
-
inline size_t getNumberOfJoints() const
- Returns:
the number of joints (same as the number of bodies)
-
inline JointRef getJoint(const std::string &name)
returns reference object of the joint
- Parameters:
name – [in] joint name
- Returns:
a JointRef to the joint. Check the example JointRefAndLinkRef
-
inline LinkRef getLink(const std::string &name)
returns reference object of the joint
- Parameters:
name – [in] the link name
- Returns:
a LinkRef to the link. Check the example JointRefAndLinkRef
-
inline const std::vector<size_t> &getMappingFromBodyIndexToGeneralizedVelocityIndex() const
- Returns:
a mapping that converts body index to gv index
-
inline const std::vector<size_t> &getMappingFromBodyIndexToGeneralizedCoordinateIndex() const
- Returns:
a mapping that converts body index to gv index
-
inline virtual ObjectType getObjectType() const final
- Returns:
the object type (ARTICULATED_SYSTEM)
-
virtual BodyType getBodyType(size_t bodyIdx) const final
- Returns:
the body type (STATIC, KINEMATIC, or DYNAMIC) of the specified body. It is always DYNAMIC except for the fixed base
-
inline virtual BodyType getBodyType() const final
- Returns:
the body type (STATIC, KINEMATIC, or DYNAMIC). It is always dynamic
-
inline void setIntegrationScheme(IntegrationScheme scheme)
- Parameters:
scheme – [in] the integration scheme. Can be either TRAPEZOID, SEMI_IMPLICIT, EULER, or RUNGE_KUTTA_4. We recommend TRAPEZOID for systems with many collisions. RUNGE_KUTTA_4 is useful for systems with few contacts and when the integration accuracy is important
-
inline std::vector<contact::Single3DContactProblem const*> getJointLimitViolations(const contact::ContactProblems &problemListFromWorld)
usage example: For 1d joints (e.g., revolute or prismatic), you can get the impulse due to the joint limit as
robot.getJointLimitViolations()[0]->imp_i[0]For a ball joint, all three components of imp_i represent the torque in the 3d space. The following joint returns the joint/body Idrobot.getJointLimitViolations()[0]->jointId.- Returns:
get contact problems associated with violated joint limits
-
inline void setJointLimits(const std::vector<raisim::Vec<2>> &jointLimits)
set new joint limits For revolute and prisimatic joints, the joint limit is {lower, upper} For spherical joint, the joint limit is {angle, NOT_USED}
- Parameters:
jointLimits – [in] joint limits
-
inline const std::vector<raisim::Vec<2>> &getJointLimits() const
get the joint limits For revolute and prisimatic joints, the joint limit is {lower, upper} For spherical joint, the joint limit is {angle, NOT_USED}
- Returns:
jointLimits joint limits
-
inline const VecDyn &getJointVelocityLimits() const
get the joint velocity limits
- Returns:
jointLimits joint velocity limits
-
inline void setJointVelocityLimits(const VecDyn &velLimits)
set the joint velocity limits
- Parameters:
velLimits – [in] joint velocity limits
-
inline virtual void clearExternalForcesAndTorques() final
Clears all external forces and torques
-
inline void addSpring(const SpringElement &spring)
- Parameters:
spring – [in] Additional spring elements for joints
-
inline std::vector<SpringElement> &getSprings()
- Returns:
springs Existing spring elements on joints
-
inline const std::vector<size_t> &getParentVector() const
- Returns:
parent parent[i] is a parent body id of the i^th body
-
inline SensorSet *getSensorSet(const std::string &name)
- Returns:
sensor of the specified type
-
inline SensorSetGroupDataType &getSensorSets()
- Returns:
sensors on the robot
-
inline void setComputeInverseDynamics(bool flag)
If it is true, it also computes inverse dynamics and you can get the following properties: the force and torque (including the constrained directions) at the joint and acceleration of a body (necessary for IMU computation)
- Parameters:
flag – [in] True to compute inverse dynamics each update.
-
inline bool getComputeInverseDynamics() const
- Returns:
return if the inverse dynamics is computed
-
inline const raisim::Vec<3> &getForceAtJointInWorldFrame(size_t jointId) const
YOU MUST CALL raisim::ArticulatedSystem::setComputeInverseDynamics(true) before calling this method. This method returns the force at the specified joint
- Parameters:
jointId – [in] the joint id
- Returns:
force at the joint
-
inline const raisim::Vec<3> &getTorqueAtJointInWorldFrame(size_t jointId) const
YOU MUST CALL raisim::ArticulatedSystem::setComputeInverseDynamics(true) before calling this method. This method returns the torque at the specified joint
- Parameters:
jointId – [in] the joint id
- Returns:
torque at the joint
-
inline int getAllowedNumberOfInternalContactsBetweenTwoBodies() const
Default is 1. This number limits the number of possible contacts between two bodies.
- Returns:
the number of possible contacts between two bodies
-
inline void setAllowedNumberOfInternalContactsBetweenTwoBodies(int count)
Default is 1. This sets the number of possible contacts between two bodies
- Parameters:
count – [in] Maximum number of internal contacts between two bodies.
-
void articulatedBodyAlgorithm(const Vec<3> &gravity, double dt)
to be removed. just for testing purposes
Public Static Functions
-
static inline void convertSparseJacobianToDense(const SparseJacobian &sparseJaco, Eigen::MatrixXd &denseJaco)
- Parameters:
sparseJaco – [in] sparse Jacobian (either positional or rotational)
denseJaco – [out] the corresponding dense Jacobian
-
struct IKOptions
-
struct IKResult
-
class JointRef
-
class LinkRef
-
struct SpringElement
-
inline const raisim::VecDyn &getGeneralizedCoordinate() const