Rayrai Example: Complete Showcase
Overview
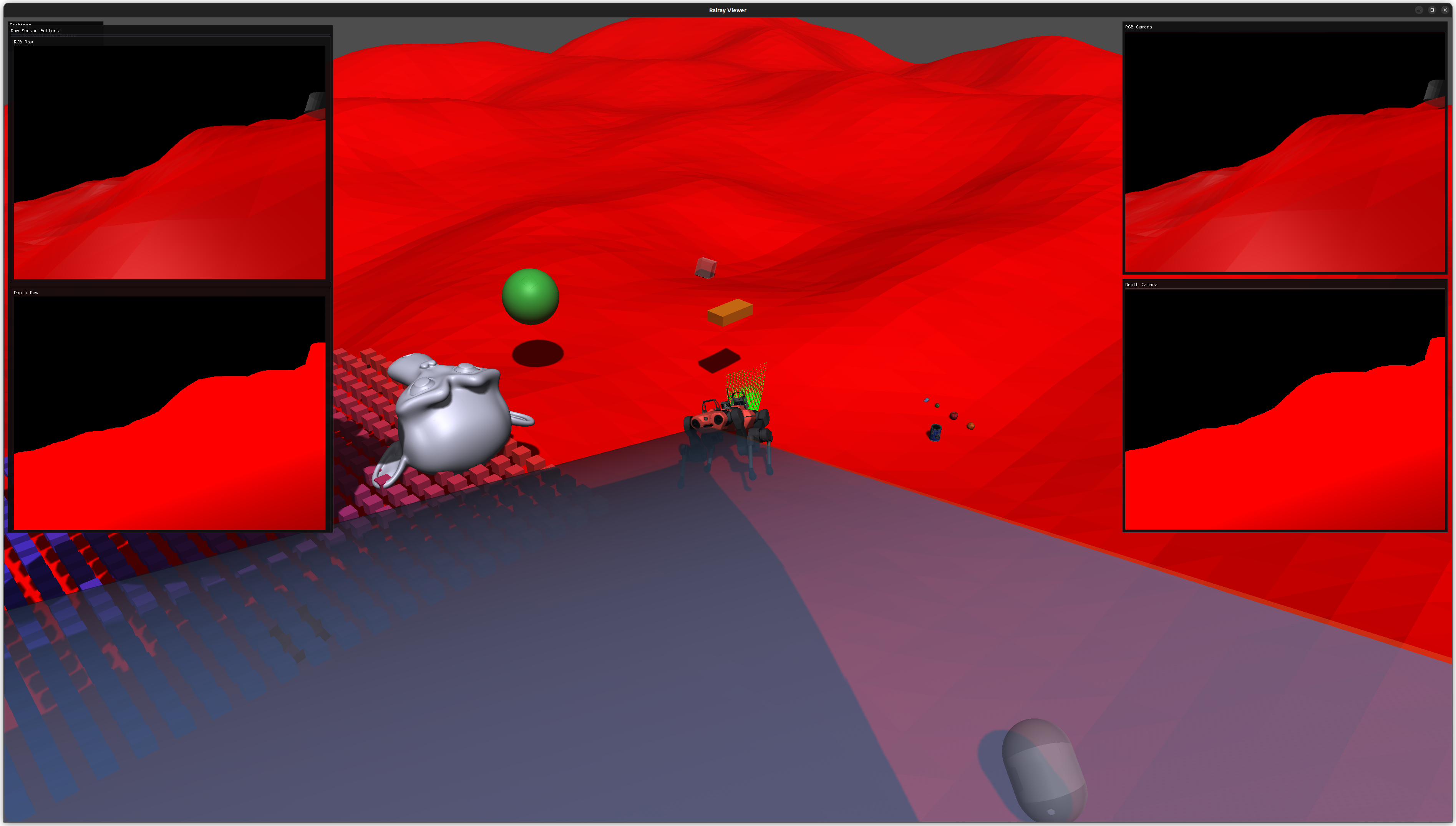
Comprehensive rayrai showcase with Go1, Livox LiDAR, D455 RGB/depth sensors, heightmap terrain, YCB objects, custom visuals, instanced geometry, and a live LiDAR point cloud. Use it as an end-to-end check for rayrai and sensor rendering.
Screenshot
Binary
Installed executable: rayrai_complete_showcase.
Run
Run the installed executable:
<raisim-install>/bin/rayrai_complete_showcase
On Windows, run rayrai_complete_showcase.exe instead.
This example uses the in-process rayrai renderer (no external client required).
Details
Loads a sensored ANYmal, heightmap terrain, primitives, and YCB objects.
Updates LiDAR scans into a point cloud and renders RGB/depth sensors.
Shows camera frustums and raw sensor buffers in ImGui.