Server Example: Dynamic Object Addition
Overview
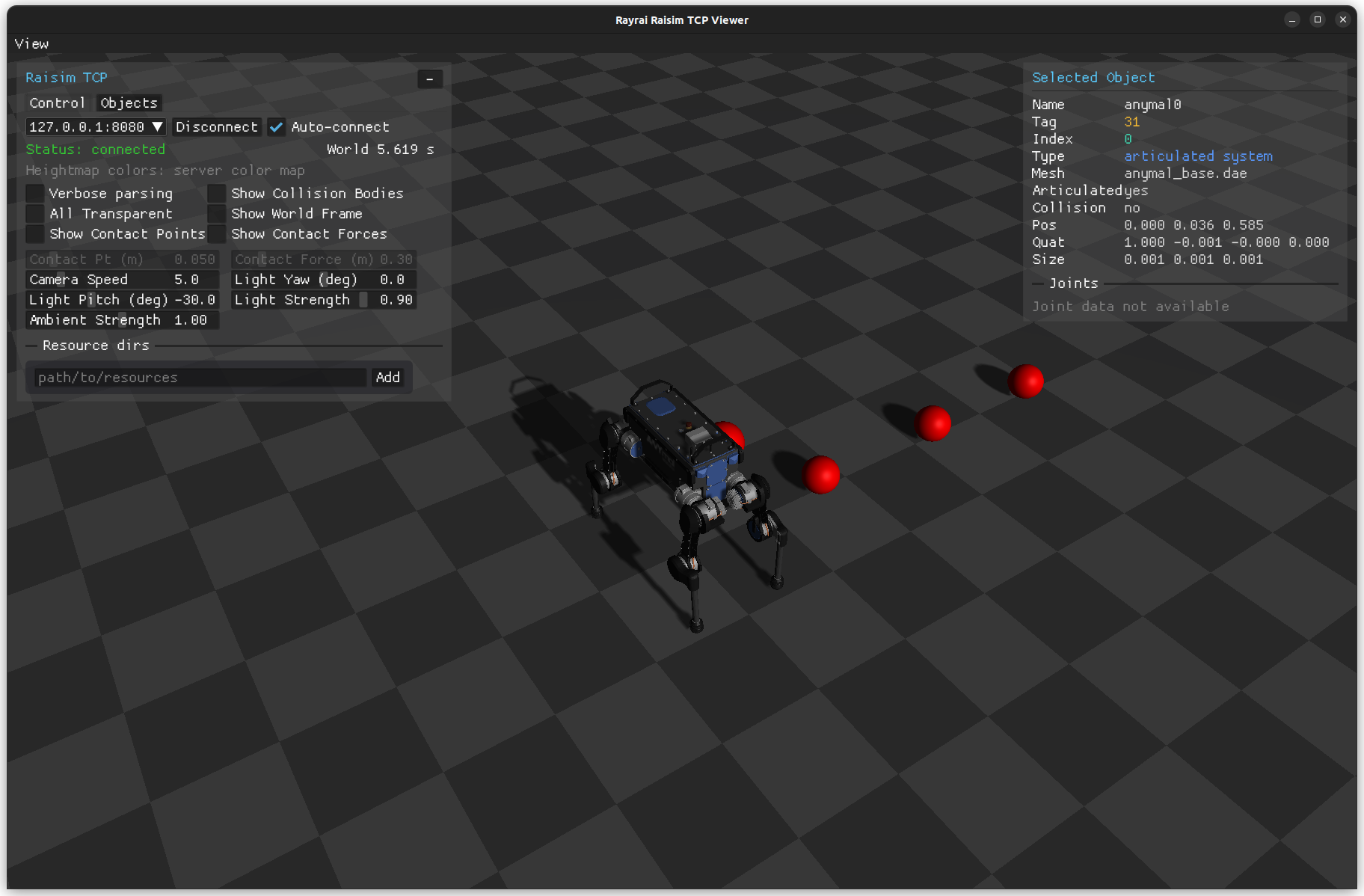
Runs an ANYmal with PD control and periodically throws balls into the scene. It shows interaction forces and how to spawn objects during a running simulation.
Screenshot
Binary
Installed executable: dynamic_object_addition.
Run
Run the installed executable:
<raisim-install>/bin/dynamic_object_addition
On Windows, run dynamic_object_addition.exe instead.
This example uses RaisimServer. Start rayrai_tcp_viewer and connect to port 8080.
Details
Spawns ANYmal with PD control and periodically adds spheres at runtime.
Sets initial velocities for new objects to create a “ball throw” effect.
Demonstrates safe world mutation while the server is running.