Server Example: Procedural Heightmap
Overview
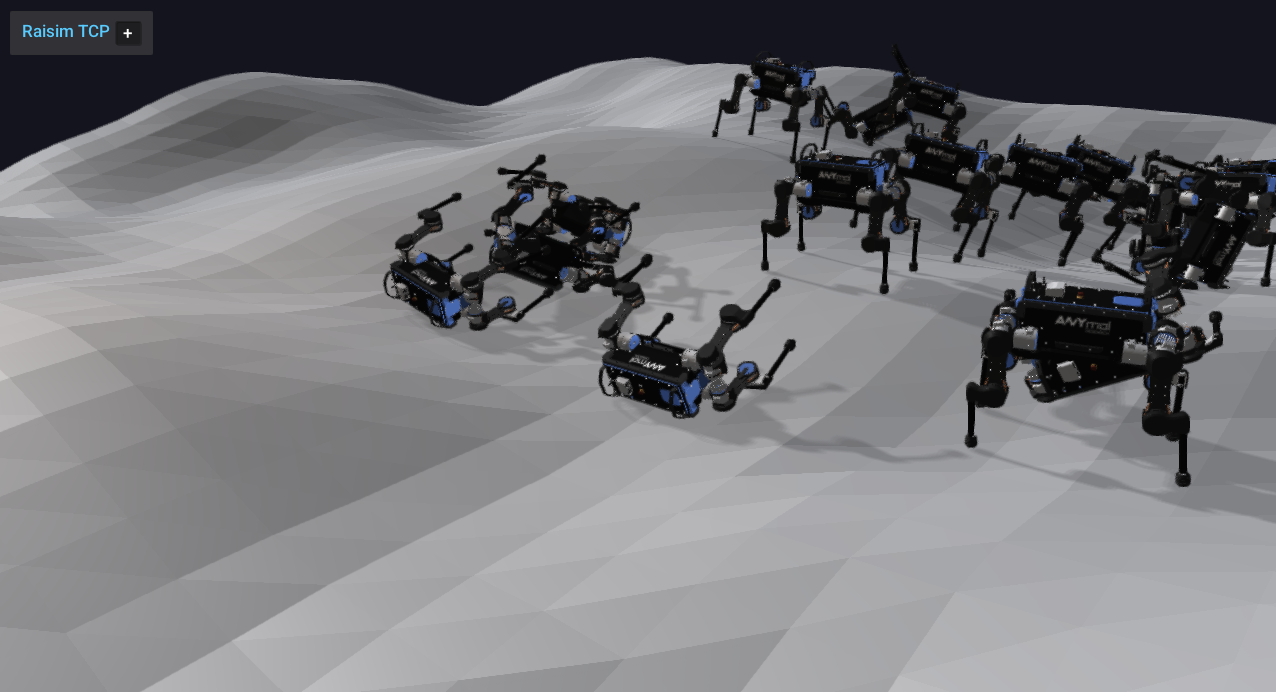
Creates a procedural heightmap and places ANYmal on top. Use this to see how to configure fractal terrain properties and run a robot on generated terrain.
Screenshot
Binary
Installed executable: procedural_heightmap.
Run
Run the installed executable:
<raisim-install>/bin/procedural_heightmap
On Windows, run procedural_heightmap.exe instead.
This example uses RaisimServer. Start rayrai_tcp_viewer and connect to port 8080.
Details
Generates terrain from
TerrainProperties(fractal noise).Spawns ANYmal on the heightmap with PD control.
Demonstrates procedural heightmap creation and appearance.