Server Example: Sensor Suite
Overview
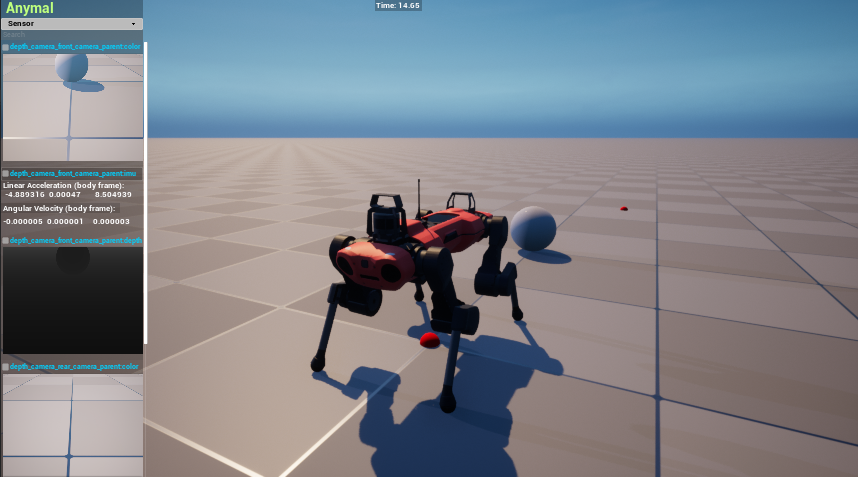
Demonstrates camera, depth, IMU, and LiDAR sensors on ANYmal, including depth-to-point cloud conversion and point cloud visualization. It is the main reference for sensor APIs.
Screenshot
Binary
CMake target and executable name: sensor_suite.
Run
Build and run from your build directory:
cmake --build . --target sensor_suite
./sensor_suite
On Windows, run sensor_suite.exe instead.
This example uses RaisimServer. Start a visualizer client (RaisimUnity, RaisimUnreal, or the rayrai TCP viewer) and connect to port 8080.
Details
Loads ANYmal with RGB, depth, IMU, and LiDAR sensors.
Uses VISUALIZER measurement source for cameras and converts depth to point clouds.
Visualizes LiDAR scans via a point cloud (Unreal-only).
Source
// This file is part of RaiSim. You must obtain a valid license from RaiSim Tech
// Inc. prior to usage.
#include "raisim/RaisimServer.hpp"
#include "raisim/World.hpp"
#include "rayrai_tcp_viewer_hint.hpp"
#include <mutex>
int main(int argc, char **argv) {
auto binaryPath = raisim::Path::setFromArgv(argv[0]);
const int loopN = 200000000;
raisim::RaiSimMsg::setFatalCallback([](){throw;});
raisim::World world;
raisim::RaisimServer server(&world);
auto checkerBoard = world.addGround(0.0, "glass");
auto sphere = world.addSphere(0.2, 5);
sphere->setPosition(2, 0, 0.5);
Eigen::VectorXd jointConfig(19), jointVelocityTarget(18);
Eigen::VectorXd jointState(18), jointVel(18), jointPgain(18), jointDgain(18);
jointPgain.setZero();
jointPgain.tail(12).setConstant(200.0);
jointDgain.setZero();
jointDgain.tail(12).setConstant(10.0);
jointVelocityTarget.setZero();
jointConfig << 0, 0, 0.54, 1, 0, 0, 0, 0.03, 0.4, -0.8, -0.03, 0.4, -0.8,
0.03, -0.4, 0.8, -0.03, -0.4, 0.8;
jointVel << 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0;
auto anymal = world.addArticulatedSystem(binaryPath.getDirectory() + "\\rsc\\anymal_c\\urdf\\anymal_sensored.urdf");
anymal->setState(jointConfig, jointVel);
anymal->setControlMode(raisim::ControlMode::PD_PLUS_FEEDFORWARD_TORQUE);
anymal->setPdGains(jointPgain, jointDgain);
anymal->setPdTarget(jointConfig, jointVelocityTarget);
anymal->setGeneralizedForce(Eigen::VectorXd::Zero(anymal->getDOF()));
anymal->setName("Anymal");
auto depthSensor1 = anymal->getSensorSet("depth_camera_front_camera_parent")->getSensor<raisim::DepthCamera>("depth");
depthSensor1->setMeasurementSource(raisim::Sensor::MeasurementSource::VISUALIZER);
// depthSensor1->setMeasurementSource(raisim::Sensor::MeasurementSource::RAISIM); // uncomment this line if you want to update the sensor using Raisim (CPU)
auto rgbCamera1 = anymal->getSensorSet("depth_camera_front_camera_parent")->getSensor<raisim::RGBCamera>("color");
rgbCamera1->setMeasurementSource(raisim::Sensor::MeasurementSource::VISUALIZER);
auto depthSensor2 = anymal->getSensorSet("depth_camera_rear_camera_parent")->getSensor<raisim::DepthCamera>("depth");
depthSensor2->setMeasurementSource(raisim::Sensor::MeasurementSource::VISUALIZER);
auto rgbCamera2 = anymal->getSensorSet("depth_camera_rear_camera_parent")->getSensor<raisim::RGBCamera>("color");
rgbCamera2->setMeasurementSource(raisim::Sensor::MeasurementSource::VISUALIZER);
auto imu = anymal->getSensorSet("depth_camera_front_camera_parent")->getSensor<raisim::InertialMeasurementUnit>("imu");
auto lidar = anymal->getSensorSet("lidar_link")->getSensor<raisim::SpinningLidar>("lidar");
auto dummySphere1 = server.addVisualSphere("dummy1", 0.05, 1, 0, 0, 1);
auto dummySphere2 = server.addVisualSphere("dummy2", 0.05, 1, 0, 0, 1);
std::vector<raisim::Vec<3>> pointCloudFromConversion;
raisim::Vec<3> posFromRaisim;
/// this method should be called before server launch
auto scans = server.addPointCloud("spinning lidar");
RSWARN("Point cloud visualization is only available in RaisimUnreal");
scans->pointSize = 0.003f;
scans->resize(512*64);
int scanCounter = 0;
server.launchServer();
raisim_examples::warnIfNoClientConnected(server);
for (int k = 0; k < loopN; k++) {
RS_TIMED_LOOP(int(world.getTimeStep()*1e6))
server.integrateWorldThreadSafe();
{
std::lock_guard<raisim::Sensor> sensorLock(*depthSensor1);
const auto &depth = depthSensor1->getDepthArray();
depthSensor1->depthToPointCloud(depth, pointCloudFromConversion, false); // this method lets you convert depth values to 3D points
auto& pointsFromRaisim = depthSensor1->get3DPoints(); // this method returns garbage if the update is done by the visualizer
posFromRaisim = pointsFromRaisim[0];
}
dummySphere1->setPosition(posFromRaisim.e()); // this doesn't work if the update is done by Raisim Unreal
dummySphere2->setPosition(pointCloudFromConversion[400].e());
{
/// lidar processing
auto& pos = lidar->getPosition();
auto& ori = lidar->getOrientation();
auto& scan = lidar->getScan();
for (auto& point : scan) {
raisim::Vec<3> scanPos = pos + (ori * point);
scans->position[scanCounter++] = scanPos;
scanCounter = scanCounter % (512*64);
}
}
}
server.killServer();
return 0;
}